
�������: 1-15 ���鵽�����ա������ѧ���� ��������ؼ�¼84�� . ��ѯʱ��(0.041 ��)

�����ѧ���պ���ѧԺ�ڸ�����������ѹ������������ȡ���½�չ��ͼ��
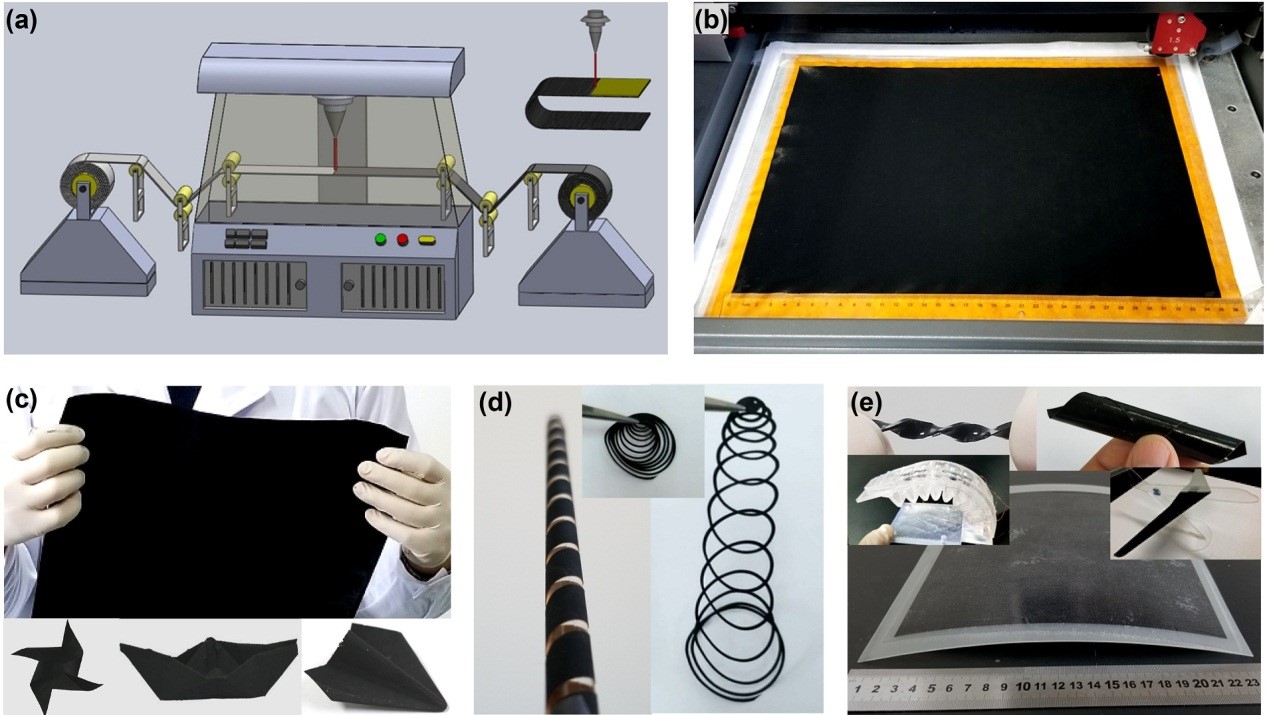
�����ѧ���պ���ѧԺ �������� ���� ѹ�������� ��ά2Dʯīϩ
2019/9/20
�������ȿɴ����Ϳ��۵���ѹ���������Ŀ������˻��������˶��������ܴ�������ĺ��Ŀ���֮һ���������������о�����֤ʵ���ײ��Ͽ��Գ�������Ĵ������ܣ�������ѹ�����������ϵ���Ҫ�о�����ά��2D��ʯīϩ���������ĵ����ԡ���еǿ�Ⱥ������Ե����ƣ���˱���Ϊ�Ǽ���Ӧ��ǰ���Ĵ��в�����ϵ��Ҳ�Ѿ����㷺�����ڹ���ѹ��ʽ��������Ȼ����2Dʯīϩ�������ѹ�����Էdz����ޣ���Ӧ��ͨ��ҪС��6.0%����Ȼ��������ʵ...
�������պ����ѧ��еѧԺ����ǧ����˹������Ŷ����������������Ƚ����췽��ȡ�ý�չ��ͼ��
�������պ����ѧ��еѧԺ ��˹�� ���� ������������ �Ƚ����� �ɴ��� �������� ���ϲ���
2018/8/19
���գ�������־��Small��(IF: 9.598, Q1)�롶Carbon����IF:7.082��Q1���Ⱥ����߿�������Ժ����ǧ����˹������Ŷӵ������о��ɹ���Laser-InducedFreestanding Graphene Papers: A New Route of Scalable Fabrication with TunableMorphologies and Properties fo...

����������������ʽ�̫�����Ӧ�����ҹ���2���߿�̫�������˻���ͼ��
�������� ��������ʽ� ̫����� 2���߿� ̫���� ���˻�
2017/6/8
���գ��ҹ������з������Ͳʺ�̫�������˻��״����20000���ٽ��ռ�������飬ȡ��Բ���ɹ����й���ѧԺ�Ϻ�ϵͳ����Ϣ�����о�������Դ���������Ʊ��ġ�����������������ʽᣨSHJ��̫����ء��״γɹ�Ӧ���ڸû�����Դϵͳ�������Էɹ����и���̫����ع�������ȶ����ṹ�ɿ���Ϊ�Էɵ�Բ���ɹ��ṩ�˴���֧�֡�̫�������˻�����̫������Ϊ����Դ��̫�������̫�������˻��Ĺؼ�����֮һ������Ҫ��ת��Ч�ʸߣ����һ�...
����ŵ�������������������ܷ���
������� �������� �������� ����
2016/10/9
����������Ϸ�����������5% ��95% �ҳ���Ϊ���������ṹ��NACA0012 ����������������ֵģ�⣬�о��˲�ͬ����ģ�����������͵��������ܺͽṹ��Ӧ. ����������ڴ��£��������Ӱ�������ͱ���ķǶ������������ӻ�ʧ�ٺ�������������ã�ʧ�ٺ�������������ϵ���½��ý�Ϊ������������Խ������ϵ���½���Խƽ�����ʵ���С����ģ���ܹ�������͵��������ܣ�Ȼ������ģ����С���������������������ܵ�����...
Ϊ�о���Χ�˶������������η����Ժ����ЧӦ�����ĸ���ľ�ȷ����ѧ��Ϊ���Ա��ǽṹ��������Ϊ�о��������������Ӧ���λ�ƹ�ϵ�������鹦ԭ���Ƶ�������Χ�˶�����������������������������Զ���ѧģ�ͣ���������ģ�Ͱ����˷����Լ��α��μ����ӷ������������Ժͷ�����ģ�ͣ���Ӧ��չ�˴�Χ�˶�����������������ֵ�������������������ת�����������������ģ�Ͷ���ѧ���Բ����������죬ָ������ģ�ͺ����˷�...
���ٽ��ռ�ƽ�����ͧ������������Ϊ�о������ݳ����ṹ������۶Գ�������ṹ����Сѹ���Ӧ�����м��㣬����ƽ�����ͧ��������ṹ����Ԫģ�͡���ģ����֤�Ļ����ϣ����÷���������Ԫ������ƽ�����ͧ��������ṹ���Խ��з���������õ�������ṹ�ڲ�ͬѹ��͵����غ�������Ӧ���ͱ��ηֲ����仯���ɣ��������˽ṹ��ǿ���ö�����Ӧ���ͱ��ε�Ӱ�죬Ϊƽ�����ͧ�ṹ����ṩ����֧�źͲο����ݡ�
��������Kirchhoffƽ�����۽�����������������Ĥ�ṹ�ľ���ѧģ�ͣ������������ľ���ѧ��ⷽ�����õ����������εĽ����⡣����������Ӧ�䡢���ĺ�ȡ������ȶ����������Ե�Ӱ�죬������������������κͼ��ι�ѧ���ܵ�Ӱ����ɡ�����Բ�����������ۣ���������������ѧģ�ͣ�Ȼ�����Reissner����ȷ������������Բ�������̵�һ��⣬��������������ѧģ�͵���ⷽ��������������...
�����ɻ����غ������²����ϴ�ĵ��Ա��β����ֳ����η���������,������������ֳ�����οռ����������,��ͳƽ���������Ĺ��̷��������������ռ�����µ���ʵ�غ�״̬����Ӱ�������ɻ��������Է�����ȷ�ԡ����Ļ��������ɻ����η������������Է���������,������������ά�����ߺ������и����ֲ�ͬ�����涨������������,���������������ֵ����˴�����½ṹ�˶���Ϣ�������غ���Ϣ֮�������úͽ���,ʵ����������ṹ...
��Գ����������¶���(GMA)���λ����������,�������������Ŵ�����Ŵ�GMA���λ��,���ò�����ѧ���ۡ��������ն���ѧ���̺�����Ԫ�������������Ŵ������λ�ƷŴ���������ѧ���Խ����˷���.���Jiles-Atherton(J-A)ģ�ͺͶ��γ�תģ�ͽ��������������Ŵ�ʽGMA�Ĵŵ����ģ��,��������AMESim&Simulink���Ϸ��滷���н�������ֵ����.���������������Ŵ�ʽGMA����,�����...
�������������������ؽڿռ�����˵���������Ӧ���Ƽ��ؽ�������
���Թؽڿռ������ ���Բ��� �����㶯 ���㷨 ����Ӧ����
2013/12/15
�о�Ư���������ؽڿռ�����˲���δ֪�غɵĹؽ��˶����Ƽ��������������⡣���ϵͳ�߶����غ��ϵ���������շ����������ռ������Ƿ������ʽ��ϵͳ����ѧģ�͡�Ϊ���������ϵͳ����ƣ����ùؽ��������������������㶯���۶�ϵͳ���п졢������ϵͳ�ֽ⡣��Կ����ϵͳ����������ַ��������������ƻ�е�۸��ؽڵ����������������ϵͳ����ƻ������㷨������Ӧ���Ʋ�����ʵ��ϵͳ���غɲ���δ֪����µĹؽ��˶��켣...
����˴�����ʽ������������ͷ,���Լ��ͷ����ײ��Ͼ����ù���.�о���������ͷ��Ч���ĺͼ������ĵĹ�ϵ,����2������ʽMooney-Rivlinģ��ģ�ⵯ�Լ��ı�����ϵ,����ANSYS�����ֱ�������������ͷ��ѹǿΪ0,9MPa�²�ͬ�ڽ���������Ч���ĺͼ�������Ư��,�õ������ߵ�Ư�ư�����,�ѷ������Ч����Ư�ƽ�����������ֵ���бȽ�,�����ü�϶��ײ������֤�˼�������Ư�Ʒ�������ȷ��,�ڴ˻���...
˫�����ռ��е�۶���ѧ��ģ�����
���պ����ѧ��������ѧ�� �ռ��е�� ���Թؽ� ���Ը� ��Ȼ���귨 ���Խڵ����귨 �켣���٪�
2013/8/19
������о����ڿռ��е�۶���ѧ��ģʱ��ֻ�����˹ؽ��������߱۸�����������ͨ�����ü���ģ̬���Ա۸˵ı��ν������������÷�����������С����������������������������Ȼ���귨�������ؽڽ��н�ģ�;��Խڵ����귨�������۸˽��н�ģ���õ��˼Ȱ����ؽ������ְ����۸������Ŀռ��е�۶���ѧ���̣����ܾ�ȷ�������۸˵�С�����Լ�����Ρ�����5�ζ���ʽ�Թؽڹ켣���й滮��ͨ���涯��ѧ�õ��ؽڵ�ǰ���������أ�����PID��...
�����ռ�������ı�ṹ����
���Կռ� ������ ��ṹ����
2013/7/29
�����о��˴��������ṹ�ռ�������Ŀ������⡣�����趨ģ̬��,��ϵͳ��Ϊ���ַ�������������ϵͳ����ϵͳ�Ƿ����Ե�,�����˶�������������ת�������˶�,����ϸ�������˱�ṹ���ƹ��ɵ�Ӧ�á�
Ϊ��ֹ�����ṹ����Ŷ�����������������������ṹΪ���ض������һ�ֲ����������ķ����ױ��������ֿ��������������Ŵ��㷨ȡ���Ż�������ͨ��ģ�������2�ζԿ������������������������Դﵽʵʱ���ſ��Ƶ�Ŀ��.��Simulink���������½�������ֵ���棬�����������Ƶķ����ױ��������ֿ��������м����ԣ���̬��������ǿ.�볣����������ֿ�������ȣ���������µ�ϵͳ��Ӧ��̬ʱ������0.9s����г������...
������һ�ֻ��ڼ���������ѧ/����ṹ��ѧ��CFD/CSD����˫��������Ϸ���.ͨ���������ֶ�������ADT����������ʶ����������֮�������-�����ϵ.���þֲ���ֵ�㷨�����������ϵͳ֮������ݽ�������ʹ��Delaunayͼӳ�䷽�����������������ƶ�.���Ա�ķ����Խṹ����Ԫ���ӿڳ������Ͼ����պ����ѧ��NUAA���ͷ��������ĵ�����������3D2MUFS�����ӣ�Ӧ���������������Ķ����е�������...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...