
搜索结果: 1-15 共查到“控制科学与技术 面向”相关记录98条 . 查询时间(0.195 秒)

微创、无创,是现代外科手术的总体发展趋势。微创手术机器人不仅让外科医生更好地控制手术器械、观察病灶及手术部位,还能降低医生疲劳,减少手术失误。本报告立足临床需求,首先从系统演进的角度介绍微创手术机器人的发展,总结各类使能技术的特点。其次,重点分析连续体手术机器人技术的临床应用研究,提出了连续性手术机器人系统框架图。最后,报告人介绍在连续体手术机器人领域的创新成果,并详细介绍最新发表的几篇论文的研究...

中国科学院深圳先进技术研究院等发展出面向血管介入手术的磁控导丝机器人(图)
血管介入手术 磁控 导丝机器人
2023/9/11
近日,中国科学院深圳先进技术研究院集成所智能仿生中心团队和深圳大学附属华南医院神经外科团队合作,在磁驱动连续体微型机器人领域取得新进展。该团队提出了具有磁驱动主动转向和自主推进能力的磁性介入导丝机器人系统。通过该系统介入,医生能远程操控磁性导丝在复杂的血管分叉处快速选择正确路径并到达目标部位,有效减少医生的辐射暴露。该团队提出了磁性导丝的建模方法与轨迹规划方法,为磁性导丝的自动控制奠定了基础。
根据《浙江大学2023年招收港澳台地区硕士研究生复试相关工作安排》,学院坚持择优录取、宁缺毋滥的原则,以提高人才选拔质量为核心,确保科学规范、公平公正。经控制学院审议通过,2023年控制学院面向港澳台地区硕士研究生招生复试工作方案如下。
浙江大学控制科学与工程学院2022年面向港澳台地区硕士研究生招生复试工作方案。

随着无人驾驶在很多领域的出现,状态估计与感知作为自主系统最重要的技术之一,比以往任何时候都显得尤为重要。2021年5月26日,美国特拉华大学黄国权博士,受中科院自动化所机器视觉组组长吴毅红研究员邀请,为所内师生做了关于“面向自动驾驶的视觉惯导融合状态估计与感知”的报告。
近日,由南开大学人工智能学院方勇纯教授作为首席科学家(项目负责人)、孙宁教授作为课题负责人,株洲天桥起重机股份有限公司牵头的国家重点研发计划“智能机器人”重点专项项目“面向有色金属浇铸过程的机器人作业系统”的中期检查会在中南大学召开。
2021年浙江大学控制科学与工程学院面向港澳台地区硕士研究生招生复试工作方案。

2020然后7月23日,由广东华中科技大学工业技术研究院(简称“广东工研院”)牵头完成,华中科技大学、中科院南海所、广船国际、中船701所、中国船舶工业综合技术经济研究院、香港城市大学等单位共同完成的“面向复杂水域作业的自主无人艇集群协同关键技术与核心装备”通过了中国自动化学会的科技成果鉴定。鉴定委员会听取了成果牵头完成单位所作的《项目技术研究报告及工作总结报告》、《科技查新报告》等,认真审查了提...
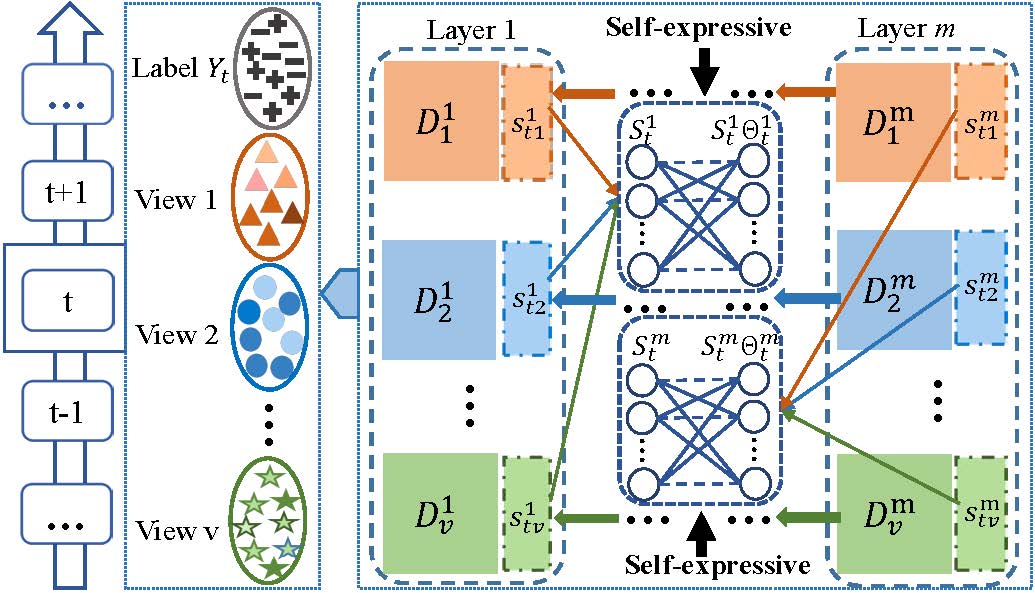
为解决现存大部分的多视角任务学习模型不能快速学习新任务的问题,中国科学院沈阳自动化研究所机器人学研究室科研团队提出了一种连续多视角任务学习算法,连续学习多个多视角任务。相关成果以Continual Multiview Task Learning via Deep Matrix Factorization为题发表于中科院一区期刊IEEE TRANSACTIONS ON NEURAL NETWORKS...
中国自动化大会是由中国自动化学会主办的国内最高层次的自动化领域大型综合性学术会议,2019中国自动化大会主题为“智能自动化承载未来”,将于2019年11月22-24日在杭州・国际博览中心召开。本次大会由浙江大学承办。中国自动化大会将为全球自动化、仪器仪表、智能制造、信息与智能科学领域的专家学者和产业界的同仁提供展示创新成果、展望未来发展的高端学术平台,加强不同学科领域的交叉融合,引领自动化、仪器仪...
面向地图构建的移动机器人局部路径自主规划
自主探索 同时定位与地图构建 覆盖路径规划
2019/3/15
移动机器人在未知场景中规划路径以自主完成定位与地图构建是机器人领域的一个重要研究课题. 本文阐述了一种利用实时构建的信息熵地图动态生成机器人的局部探索路径, 并综合转向约束和避障约束设计了一种基于模糊评价方法的方向选择策略跟踪生成的局部路径并进行环境构图. 与现有方法相比, 本文方法能够根据环境动态地生成平滑连续的局部探索路径, 并能引导机器人进行障碍物躲避和完成自主构图. 实验结果表明相较对比方...
移动机器人主要依靠激光雷达采集的点云和摄像机采集的图像信息来感知周围环境. 在极端天气或夜晚的情况下, 摄像机采集图像会受到极大干扰; 本文基于聚类典型相关分析(cluster-CCA)提出一种面向室外移动机器人的雷达图像跨模态检索技术, 首先利用深度学习网络提取点云和图像的特征, 然后使用聚类典型相关分析将两种模态的特征映射到子空间, 最后计算欧氏距离进行检索, 可以从图像数据库中检索得出与点云...
哈尔滨工业大学机电工程学院面向港澳台地区硕士招生目录及参考书目
哈尔滨工业大学机电工程学院 港澳台地区 硕士 招生目录 参考书目
2017/12/8
哈尔滨工业大学机电工程学院面向港澳台地区硕士招生目录及参考书目。
第八届方程式的面向对象建模语言和工具国际研讨会(8th International Workshop on Equation-Based Object-Oriented Modeling Languages and Tools)
第八届 方程式 面向 对象 建模 语言 工具 国际研讨会
2017/11/27
Many engineers rely heavily on model-based design and control of complex cyber-physical systems. Of paramount importance is the ability to capture all central aspects of such systems in the models, in...