
搜索结果: 1-15 共查到“控制科学与技术 工具”相关记录16条 . 查询时间(0.106 秒)
中国科学院微电子所在Chiplet热仿真模型及工具研究方面取得进展(图)
仿真模型 器件集成 系统芯片
2023/5/31
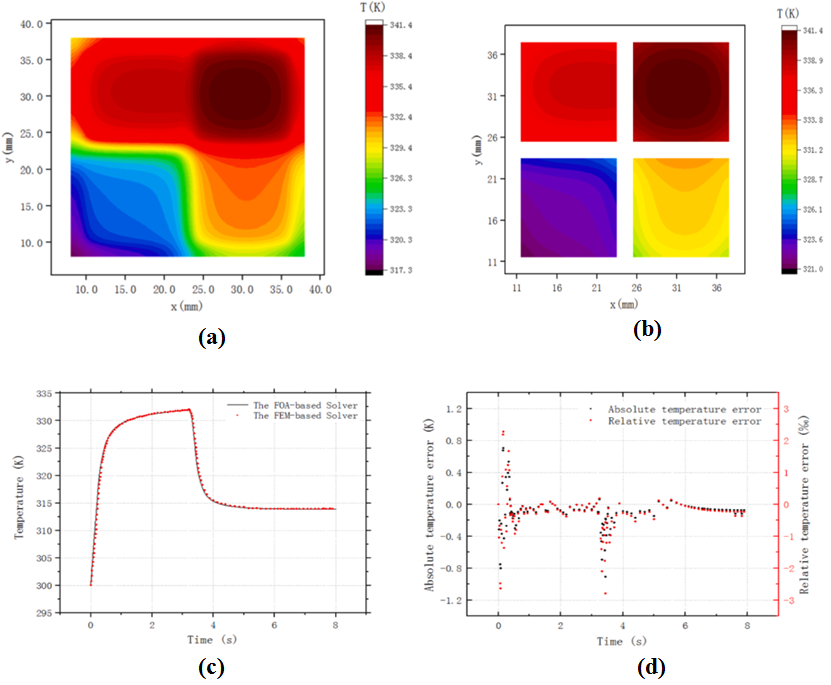
后摩尔时代,依靠缩小尺寸提升器件集成度的硅基CMOS技术面临物理原理和工艺技术的巨大挑战,具有高性能、低功耗和低成本优势的Chiplet技术成为延续摩尔定律的重要选择之一。该技术利用先进封装工艺,将多个异构芯片集成为特定功能的系统芯片,从而满足人工智能等领域的应用需求。但由于Chiplet异构集成密度大幅增加,热耗散问题对异构系统的可靠性造成严峻挑战。如何针对Chiplet异构集成系统的复杂性,提...

长安大学牵头承担的国家重点研发计划“自动驾驶仿真及数字孪生测试评价工具链”项目启动暨实施方案论证会召开(图)
长安大学 国家重点研发计划 自动驾驶仿真 数字孪生测试评价工具链 方案论证会
2022/4/13
2022年4月9日,由长安大学赵祥模教授牵头承担的国家重点研发计划“新能源汽车”重点专项“自动驾驶仿真及数字孪生测试评价工具链”(项目编号:2021YFB2501200)项目启动暨实施方案论证会在西安召开。专家组由清华大学李克强院士担任组长,中国汽车工程学会李骏院士、武汉理工大学严新平院士、北京航空航天大学王云鹏院士、交通运输部科技司岑晏青研究员、中国汽车技术研究中心吴志新研究员、长安大学马建教授...
第八届方程式的面向对象建模语言和工具国际研讨会(8th International Workshop on Equation-Based Object-Oriented Modeling Languages and Tools)
第八届 方程式 面向 对象 建模 语言 工具 国际研讨会
2017/11/27
Many engineers rely heavily on model-based design and control of complex cyber-physical systems. Of paramount importance is the ability to capture all central aspects of such systems in the models, in...
2018年系统安全应急方法,技术和工具专题会议(Special Session on Emergent Methods, Techniques and Tools for Systems’ Security )
2018年 系统安全应急 方法 技术 工具 专题会议
2017/11/27
This special session deals with the problems related to systems' security. With the increasing complexity of computer systems and communication networks, the requirements for security have become more...
为满足人机共融环境下机器智能对工具功用性认知的需要,模拟人类自底向上的认知方式,设计了一种基于部件功用性语义组合的聚类方法,来对家庭日常工具进行表示与建模.首先,设计了工具功用性部件边缘表示方法并基于结构随机森林加以建模.然后基于功用性部件组合思想,设计了高层语义空间上联合各部件显著度的工具整体表示方法并采用聚类方式构建工具功用性字典.在线检测阶段,联合测试样本各功用性部件的显著度,利用其与工具功...
2017年商用电磁仿真工具进展研讨会(Workshop on Advances in Commercial Electromagnetic Simulation Tools)
2017 商用 电磁仿真工具 进展 研讨会
2017/2/15
Commercial EM Simulation tools such as HFSS, CST, FEKO, EMPIRE are widely used by the members of the EurAAP society. Over the past two decades these tools have matured to be reliable and accurate simu...
压裂完井工具高压模拟井筒壁厚的研究
模拟井筒 壁厚 内压 数值模拟
2013/9/5
介绍了压裂完井工具高压模拟井筒试验装置的组成和作用。建立了高压模拟井筒的三维仿真模型,并对模拟井筒上的测压孔进行了处理。利用ANSYS软件,对不同壁厚的模拟井筒进行了数值模拟分析。仿真结果表明,当模拟井筒承受105 MPa内压时,测压孔处屈服应力最大,且模拟井筒材料选用35CrMo,壁厚为40 mm时,内径121 mm的模拟井筒可满足设计要求。
哈尔滨理工大学电气与电子工程学院PLC电气控制与组态设计课件第六章 第一节 松下电工PLC编程工具简介
哈尔滨理工大学电气与电子工程学院 PLC电气控制与组态设计 课件 第六章 第一节 松下电工PLC编程工具简介
2012/5/11
哈尔滨理工大学电气与电子工程学院PLC电气控制与组态设计课件第六章 第一节 松下电工PLC编程工具简介。
哈尔滨理工大学控制系统CAD与仿真课件第十三章 控制系统工具箱。
基于显微图像处理的微操作工具深度信息提取方法
点扩散参数 深度信息 微操作
2008/12/24
提出并实现了一种通过显微图像处理获取目标深度信息的方法, 将此种方法应用于生物医学实验中常用的微操作工具---微针的深度信息提取, 取得了较好的效果. 首先, 论述了深度信息提取原理; 之后, 研究了微针的成像模型, 详细分析了显微图像点扩散参数获取与微针深度信息提取的方法, 给出了相关的实验结果. 最后, 将此方法应用于微操作机器人系统, 利用离焦状态双针互插实验验证了方法的有效性. 结果表明,...
一种基于抽象解释的WCET自动分析工具
实时程序 WCET分析工具 抽象解释
2008/12/19
利用基于抽象解释的变量值范围传播技术,提出了一种自动分析高级语言程序流信息的方法;并在白盒测试工具NPCA的基础上,利用该方法实现了WCET分析工具NPCA-WCET。
水下机器人作业工具研制与开发
水下机器人 作业工具 水下作业
2008/11/5
该项目是中科院沈阳自动化所为所研制的作业型水下机器人进行开发的水下作业工具,包括五功能开关控制机械手,六功能主从伺服控制机械手,533型夹持器,324型夹持器,25毫米钢缆切割器,海水冲洗枪,缆绳释放器和清洗刷等。其中五、六功能水下机械手为水下机器人的通用作业装备,其它工作可根据作业任务的需要进行一至多项的灵活组合,并可在现场快速实现安装与拆卸。作业工具均采用计算机系统控制,液压动力驱动,配备于...
水下机器人作业工具研制开发
水下机器人 作业工具
2008/10/30
该项目是中科院沈阳自动化所为所研制的作业型水下机器人进行开发的水下作业工具,包括五功能开关控制机械手,六功能主从伺服控制机械手,533型夹持器,324型夹持器,25毫米钢缆切割器,海水冲洗枪,缆绳释放器和清洗刷等。其中五、六功能水下机械手为水下机器人的通用作业装备,其它工作可根据作业任务的需要进行一至多项的灵活组合,并可在现场快速实现安装与拆卸。作业工具均采用计算机系统控制,液压动力驱动,配备于中...
国防科技大学机电工程与自动化学院自动控制原理中文课件:第二十四讲 控制系统分析仿真工具Matlab简介。