
搜索结果: 1-7 共查到“知识要闻 控制科学与技术 面向”相关记录7条 . 查询时间(0.223 秒)

微创、无创,是现代外科手术的总体发展趋势。微创手术机器人不仅让外科医生更好地控制手术器械、观察病灶及手术部位,还能降低医生疲劳,减少手术失误。本报告立足临床需求,首先从系统演进的角度介绍微创手术机器人的发展,总结各类使能技术的特点。其次,重点分析连续体手术机器人技术的临床应用研究,提出了连续性手术机器人系统框架图。最后,报告人介绍在连续体手术机器人领域的创新成果,并详细介绍最新发表的几篇论文的研究...

中国科学院深圳先进技术研究院等发展出面向血管介入手术的磁控导丝机器人(图)
血管介入手术 磁控 导丝机器人
2023/9/11
近日,中国科学院深圳先进技术研究院集成所智能仿生中心团队和深圳大学附属华南医院神经外科团队合作,在磁驱动连续体微型机器人领域取得新进展。该团队提出了具有磁驱动主动转向和自主推进能力的磁性介入导丝机器人系统。通过该系统介入,医生能远程操控磁性导丝在复杂的血管分叉处快速选择正确路径并到达目标部位,有效减少医生的辐射暴露。该团队提出了磁性导丝的建模方法与轨迹规划方法,为磁性导丝的自动控制奠定了基础。

随着无人驾驶在很多领域的出现,状态估计与感知作为自主系统最重要的技术之一,比以往任何时候都显得尤为重要。2021年5月26日,美国特拉华大学黄国权博士,受中科院自动化所机器视觉组组长吴毅红研究员邀请,为所内师生做了关于“面向自动驾驶的视觉惯导融合状态估计与感知”的报告。

2020然后7月23日,由广东华中科技大学工业技术研究院(简称“广东工研院”)牵头完成,华中科技大学、中科院南海所、广船国际、中船701所、中国船舶工业综合技术经济研究院、香港城市大学等单位共同完成的“面向复杂水域作业的自主无人艇集群协同关键技术与核心装备”通过了中国自动化学会的科技成果鉴定。鉴定委员会听取了成果牵头完成单位所作的《项目技术研究报告及工作总结报告》、《科技查新报告》等,认真审查了提...
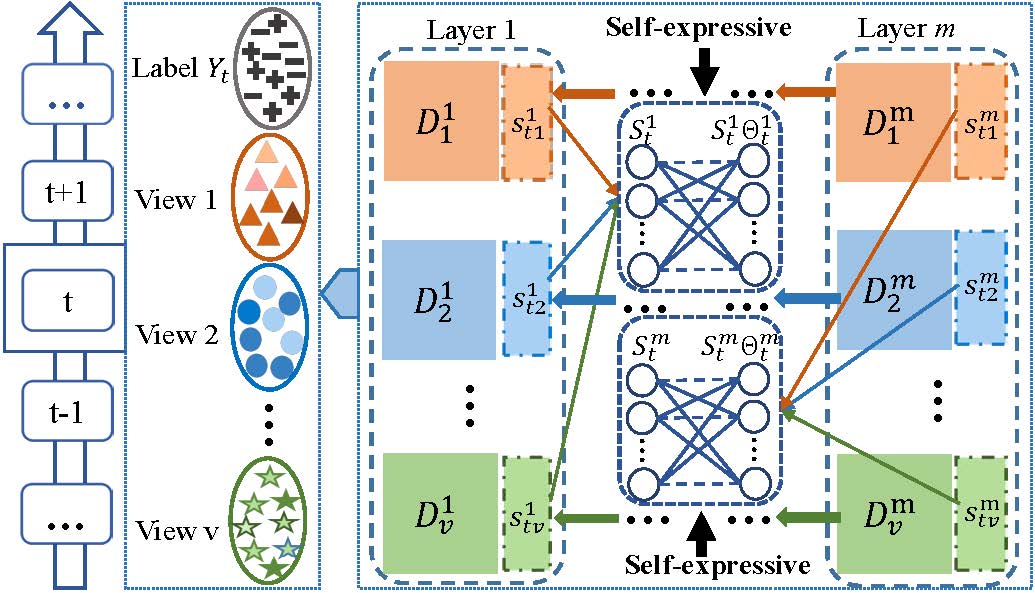
为解决现存大部分的多视角任务学习模型不能快速学习新任务的问题,中国科学院沈阳自动化研究所机器人学研究室科研团队提出了一种连续多视角任务学习算法,连续学习多个多视角任务。相关成果以Continual Multiview Task Learning via Deep Matrix Factorization为题发表于中科院一区期刊IEEE TRANSACTIONS ON NEURAL NETWORKS...

国家智能制造装备专项“面向新型铜冶炼工艺过程的智能成套测控系统研发与示范应用项目”通过验收(图)
面向新型铜冶炼工艺过程的智能成套测控系统研发与示范应用项目 中国科学院沈阳自动化研究所
2016/7/18
2016年7月15日,由中国科学院沈阳自动化研究所承担的国家智能制造装备专项,“面向新型铜冶炼工艺过程的智能成套测控系统研发与示范应用”项目顺利通过验收。项目验收会在山东东营鲁方金属材料有限公司举行,由中国科学院科技促进发展局主持并邀请有关专家组成验收评审专家组。验收会上,项目负责人――沈阳自动化所研究员王卓汇报了该项目的整体情况及技术特点。该项目面向“氧气底吹连续炼铜”新工艺过程,针对新工艺具有...