
搜索结果: 166-180 共查到“控制科学与技术 机器人”相关记录3084条 . 查询时间(0.149 秒)

2023年2月中旬,中国科学院自动化研究所和华东医院自主研发的全新一代微创血管介入手术机器人VasCure成功完成首批5例临床冠脉支架植入手术。手术治疗成功率及器械递送成功率均达100%,不良并发症发生率0%,进一步验证了该手术机器人在临床阶段应用的安全性、稳定性、有效性,为推广该机器人进入临床应用奠定了坚实的基础,实现了微创介入手术机器人里程碑式的突破。
宁波材料所在磨抛机器人方面取得进展(图)
磨抛机器人 系统结构 氮气弹簧
2023/2/1
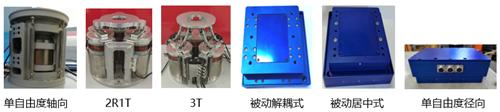
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...

2022“智新杯”全国人工智能机器人创新大赛颁奖典礼成功举行(图)
智新杯 人工智能 机器人 颁奖典礼
2023/1/10
2023年1月7日,由中国人工智能学会(CAAI)主办、CAAI人工智能基础专委会承办、国际信息研究学会协办的(第五届)2022“智新杯”全国人工智能机器人创新大赛颁奖典礼通过线上形式成功举行。
关于2022机器人科技竞赛与实践教学研讨会延期举办的通知
2022年 机器人 研讨会 延期
2022/12/29
鉴于近期国内疫情情况较为复杂,部分地区连续新增确诊病例,疫情传播风险增大,为保障各位参会老师的健康和安全,降低疫情传播风险,经与多方沟通协调,慎重考虑,决议将原定于2023年1月7日一9日在云南省昆明市举办的2022机器人科技竞赛与实践教学研讨会延期举办。
中国科学院宁波材料技术与工程研究所先进制造技术研究所成果:全向移动机器人(图)
先进制造技术研究所 成果 移动机器人
2022/12/25
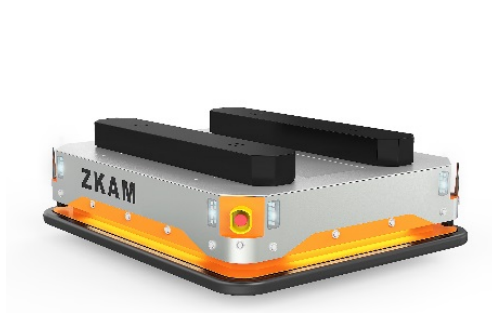
本项目创新设计了一种基于解耦式主动万向脚轮的全向移动机器人,可实现0-360°的无滑转滑移的运动,与传统移动式机器人相比,其具有无转弯半径且灵活高效的优势。围绕全向移动式机器人,精密驱动与智能机器人技术团队掌握了相关的高效直驱电机设计技术、高性能直驱电机驱动控制及底层运动控制技术和机器人定位导航等核心关键技术,拥有核心技术知识产权,可根据需求进行定制化。在机器人与智能制造装备技术的市场需求日益增长...
科学家使用铁磁机器人实现灵活高效的自动化病毒检测
铁磁机器人 自动化 病毒检测
2022/12/16
在全球范围内提高病毒诊断和监测检测能力是流行病预防的关键。核酸扩增检测(NAATs)相比抗原抗体检测具有更优的灵敏度、特异性和快速部署能力。然而,当前基于 NAAT 的自动化检测平台无法灵活实现集成的液体处理、分析和自动反馈流程,并且它们的设备笨重、昂贵、试剂损耗大,需要繁琐的安装和维护要求,因此限制了其检测能力。
2022中国机器人大赛暨RoboCup机器人世界杯中国赛(2022年11月)比赛已结束,现将比赛证书及发票的领取方式公布如下。
为促进我国机器人科技竞赛的平稳发展,加快机器人科技竞赛与国家科技发展战略、课程教学体系的融合、贯通,交流、研讨各高校在机器人竞赛、教学实践、课程改革等方面的经验、成果,并为举办好2023及之后中国机器人大赛暨RoboCup机器人世界杯中国赛、提高各参赛队的研究水平,中国自动化学会机器人竞赛工作委员会现拟组织开展“2022机器人科技竞赛与实践教学研讨会”。

2022年11月23日,2022世界智能制造大会发布了“2022世界智能制造十大科技进展”“2022中国智能制造十大科技进展”共20项智能制造科技成果。其中,中国科学院沈阳自动化研究所“变刚度薄壁复杂曲面零件机器人智能磨抛”技术入选“2022中国智能制造十大科技进展”。
“极区科考机器人技术、系统与应用”专题论坛成功举行
极区科考机器人 专题论坛 空地协同机器人
2022/12/1
2022年11月26日,“极区科考机器人技术、系统与应用”专题论坛以线上方式举行。该论坛由依托于中国科学院沈阳自动化研究所的中国自动化学会机器人专委会主办,大会进行了全程直播。
以蚯蚓为灵感 科学家研发土壤分析农业机器人
蚯蚓 土壤分析农业机器人 土壤
2022/12/1
如果你想要了解某地的土壤条件,在理想状态下观察蚯蚓就可以了。但在实际操作过程中往往不太可能,为此科学家受到蚯蚓的启发,研制出了土壤分析农业机器人。这台由纽约康奈尔大学开发的机器人,长度在 1-2 英尺(30.5-60 厘米)之间。
中国科学院沈阳自动化所微型机器人研究获进展(图)
沈阳自动化 微型机器人 驱动纳米机器
2022/12/1
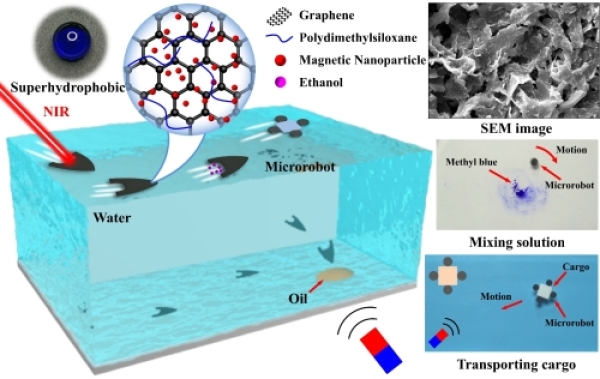
超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家展开研究,探索这一特性在相关领域的应用前景,例如细胞操作、净化水源等。然而,目前大部分对于超疏水微型机器人的研究均是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到限制。

中国科学院沈阳自动化研究所微型机器人研究取得新进展(图)
微型机器人 中国科学院沈阳自动化研究所 水环境
2022/11/30
超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家们展开了诸多研究,探索它的这一特性在诸多领域的应用前景,例如细胞操作,净化水源等。然而,目前大部分对于超疏水微型机器人的研究都是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到了限制。
软体机器人队伍来了“蝶泳”高手 均速可达每秒近四个身长
软体机器人 蝶泳 斯特劳哈尔数
2022/11/24
据最新一期《科学进展》杂志,美国北卡罗来纳州立大学的研究人员开发出了一种节能的软体机器人,它的游泳速度比以前的游泳软体机器人快4倍以上。这些机器人被称为“蝴蝶机器人”,因为它们的游泳动作类似于人类蝶泳时手臂的动作。

浙江大学邹俊教授作客“机器人学前沿学术论坛”(图)
机器人学前沿学术论坛 邹俊 浙江大学
2022/11/21
近日,应机器人学国家重点实验室邀请,浙江大学机器人与智能装备科技联盟秘书长邹俊教授访问中国科学院沈阳自动化研究所,作客“机器人学前沿学术论坛”,作了题为《基于流体动力的柔性驱动与传动的一些探索与思考》的学术报告。沈阳自动化研究所副所长刘连庆出席并主持报告会,相关科研人员及研究生近百人参加了此次报告会。