
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� �ͻ���������ؼ�¼28�� . ��ѯʱ��(0.019 ��)

2023��5��10�գ������й���ѧԺ�����Ƚ������о�Ժ���������ܷ����о����ĵ��������������о��ŶӺ����������һ�����������������������ĸ����˶�ѧϰ���Ʒ�����ͨ������ѧϰ����ѵ������˿ɿشų��仯��������������ֶ�����Ԫ֮��Ĺ�ϵ���ɣ�ʵ���˷����������ĸ����˶������ұ��������踴�ӵ��Σ�����������³���ȶ��ԣ��������˶����̲�������Ŷ�Ӱ�졣
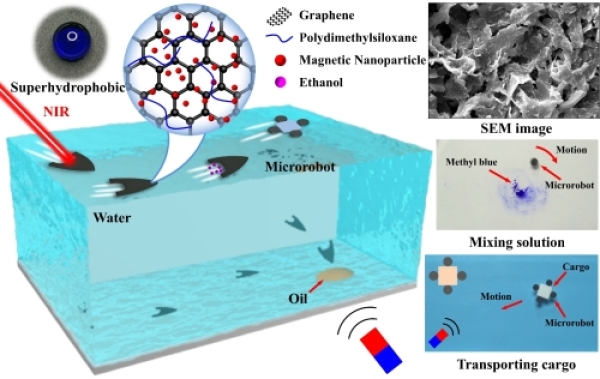
����ˮ�ͻ��������������̼�����ˮ���ϸ�Ч�ζ���Χ����һ�����ѧ��չ���о���̽����һ��������������Ӧ��ǰ��������ϸ������������ˮԴ�ȡ�Ȼ����Ŀǰ�ֶ��ڳ���ˮ�ͻ��������о�����Χ�Ƶ�һ�̼�������ģʽ��ʹ�ó���ˮ�ͻ��������˶������ڸ��ӵ�ˮ�������ܵ����ơ�

����ˮ�ͻ��������������̼�����ˮ���ϸ�Ч�ζ���Χ����һ�����ѧ����չ��������о���̽��������һ��������������Ӧ��ǰ��������ϸ������������ˮԴ�ȡ�Ȼ����Ŀǰ�ֶ��ڳ���ˮ�ͻ��������о�����Χ�Ƶ�һ�̼�������ģʽ��ʹ�ó���ˮ�ͻ��������˶������ڸ��ӵ�ˮ�������ܵ������ơ�
�¹�����˹�����ʿ�����ϵͳ�о����Ŀ�ѧ�ҽ�����������������ѧ���ϣ�Ϊ�˾��䱸�˹��������������������������δ������ִ�п�����������о�����������һ�ڡ���ѧ��չ����־��

2022��3��29�գ��й���ѧԺ�����Ƚ������о�Ժ���������ܷ��������Ŷ����ͻ���������ȡ���½�չ�������ͬ�ų��¶�������������ͻ�����������ͬ�ų������Զ������Ƶ����⣬�Ŷ������һ����ȫ����Ķ�����������ͻ������������Ʋ��ԣ��״�ʵ����4�����������ͻ������Ķ���λ�ÿ��ƺ�3�����������ͻ������Ķ���·��������ơ�

��Ȼ�����������涼���ж��صIJ������Լ�������˶����ܣ�����������������г���ˮ���ԣ��ܿ�����ˮ�滬�С���Ծ�������ᱡ���۵����������ĸ��ۣ������С�������������Ӿ���ܷ���ȡ����ģ���������Ƴ�������ӱ���������ͻ���������ʾ�۳߶����µ�������ɲ����������࣬�ǿ�����Ա˼������Ե����⡣

�廪��ѧ���ڹ����о���Ժ�ŕF���������ŶӺ������þ������ʵ�������ͻ����������ԣ�ͼ��
�廪��ѧ���ڹ����о���Ժ �ŕF ������ ���� �ͻ�����
2021/7/5
�����ͻ��������������Ļ�����Ӧ�ԡ��ж������ԺͿɼ�Ⱥ����ҵ���ص㣬���ֺ��Ѿȡ�������⡢��������������С�ռ���ҵ���Ͼ��м����Ӧ��DZ�������ǣ��������Բ��Ͼ��еնȡ��ױ��ε��ص㣬����ִ�л����ձ�������������������˶����Ȳ�����⣬������������������˶��;�ȷ���ƴ�����ս��
һֱ���������������㷺�����������졢�ɻ�����ȹ�ҵ�Զ���������������ҽѧ���ṹ����װ����δʵ���Զ�������������ҵ��������Ŀǰ�ӹ����ṹֻ�м�ʮ���׳�����ζ���ôС�Ľṹ����װ��Ϊ���������ٵ�һ����ս��

�ͻ�������ͨ��ѪҺ����ҩ�ͼ��
�ͻ����� ͨ��ѪҺ ����ҩ��
2020/5/26
�ܹ�����Ѫ�������ƶ�������ҩ���������г�һ�տ��ܻᱻ������ϸ��ֱ�����ͻ���ҩ��ݡ��¿�ѧ�ҡ��������¹�˹ͼ��������˹�����ʿ�����ϵͳ�о�����Metin Sitti����ͬ�¿�������һ����Ϊ����Ͳ�����ͻ�����������Я������ҩ���ѡ���Ե����������ٰ�ϸ�����о�С��������ڵİ�ϸ���л�����������������У���Щ��ϸ����������ѪҺ�����ķ�������Ѫ�ܱ��ƶ���
���ⲿ�ų������IJ��������������ͻ���������������������ṹ����װ�䡢����ϡ�������ҩ�ȷ��涼���ž��Ӧ��ǰ�������ı�����һ���Թ轺Ϊ���ʵĴ����Կ��������屡Ĥ�ͻ������������������ת�ų��������Զ��γ�������״������ճ��Һ�����ζ����������������ȣ����屡Ĥ������������Χ�����������ԽӴ�����δ������ҽѧӦ���У����Ա������֯����������ˡ����������屡Ĥ�ͻ������ڰ����ҩ���������������...
�ͻ������ܸ�Ч�����ˮ���ؽ���
������ �ؽ���
2016/4/13
�ɵ¹�����˹�����ʿ��о�����ѧ�Ҵ����һ�������Ŷ����������һ���ͻ���������Ѹ�������ҵ��ˮ�е���Ⱦ����ؽ����������մ�������ѭ�����ã���������һ�ָ�Ч���õ���ˮ����������
�ͻ�����Ҳ�ᡰ�貨������ͼ��
�ͻ����� �貨��
2015/8/6
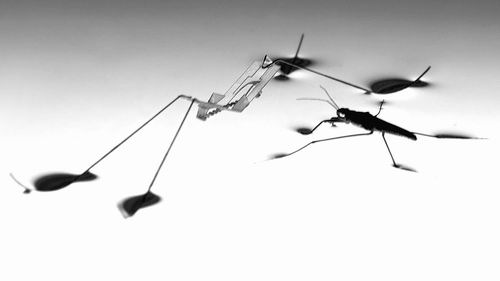
���գ��о���Ա��Ʋ������һ���ͻ�����������������ˮ�����ߣ�������ˮ��һ����ˮ��������Ծ��ˮ��������ʮ����ӯ��������ˮ���ϸ߸���������������Ϊ��ë�Ľ���ˮ���ϻ���ǰ������ǰ������ʦ�Ѿ���Ƴ���ˮ�������������ǿ�����ˮ�����ߣ���ȴ�Ӳ��ܸ���������Ծ�����ѵ��������о���Ա�����ڡ���ѧ����־����汨��˵������µij��ͻ����������ˮ����������С��������Ϊ68���ˣ�ԶԶС��ˮ��������ͬ���������ij��ء�
�����һ�����ͷ¹�������ͻ������������������Ȳ�����ˮ�����к��ζ������й�����һ�����ܱ�ĤICPF��Ionic Conducting Ploymer Film��������ICPF���б��͵�ѹ���������ԺͿ�����Ӧ���ص㡣Ϊ�����������Ŀɿ��Ժ�����ԣ���������α���嶯��ѧ����PRBDM���������������ȵĶ���ѧģ�ͣ���ģ���ǻ��ھ���ѧ���˶�ѧ�������˶�̬Ӱ�����ؽ��������ġ�Ȼ�������������ȵĽ�λ�Ʒ�...

��������ѧ�ձ���������ǰ�������նɴ�ѧ���о���Ա�ɹ�����һ�ִ��ԡ�����ֽ�������������������������еĵͳɱ����������������о�ϸ���������ӣ��ͻ������Լ�С���������ȡ� 
ϸ����С���ͻ�����������ͼ��
ϸ����С �ͻ�����
2009/4/21
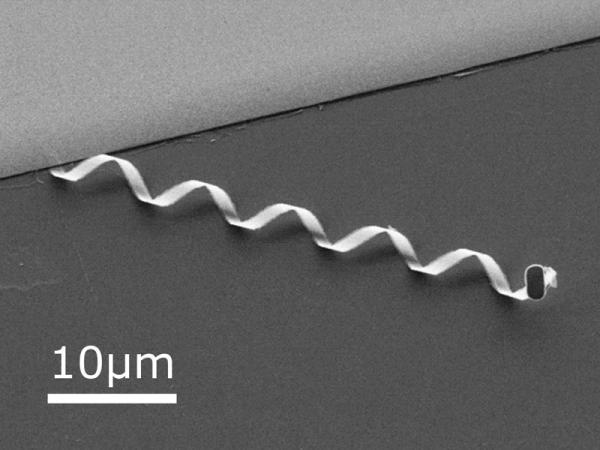
�ݡ�ÿ�տ�ѧ����վ4��9�ձ�������������������ѧԺ���о���Ա�״��Ƴ�����ϸ����С�൱���ͻ�������ּ�ڰ�������IJ����ָ�������
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...