
搜索结果: 1-15 共查到“控制科学与技术 进展”相关记录218条 . 查询时间(0.631 秒)
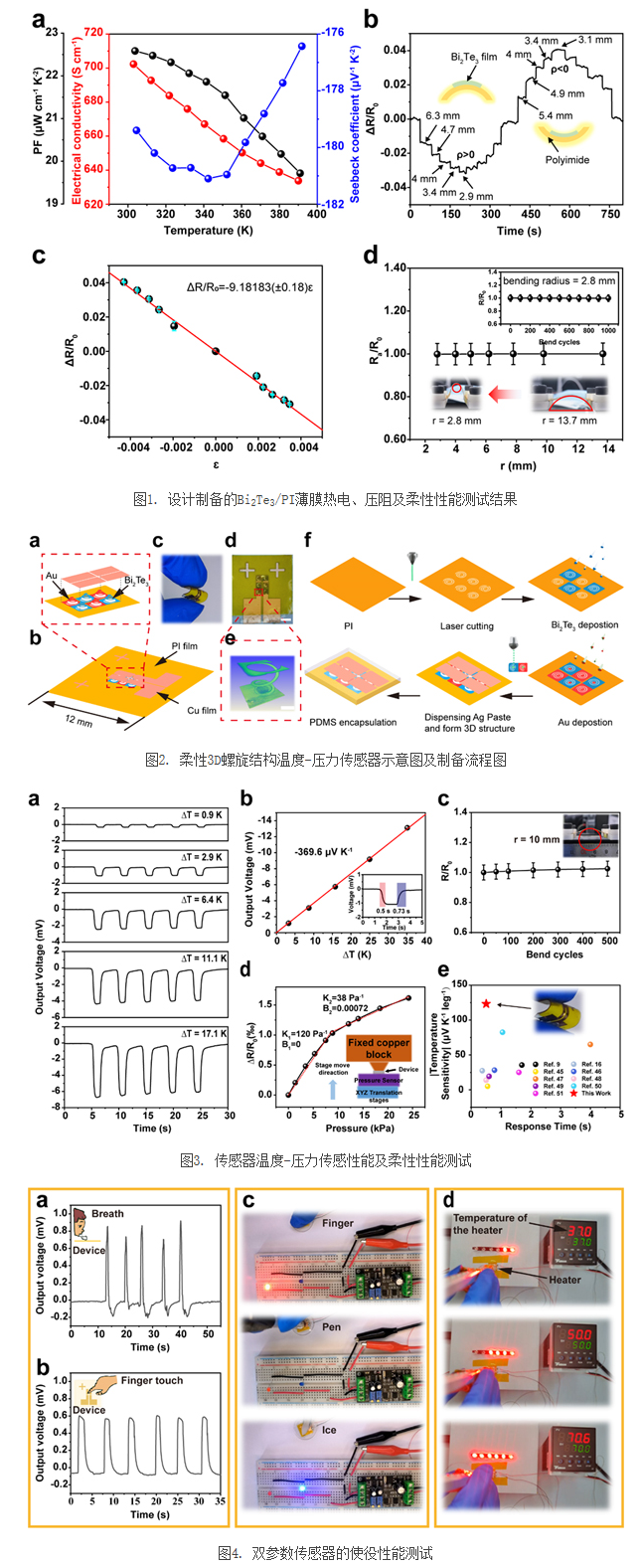
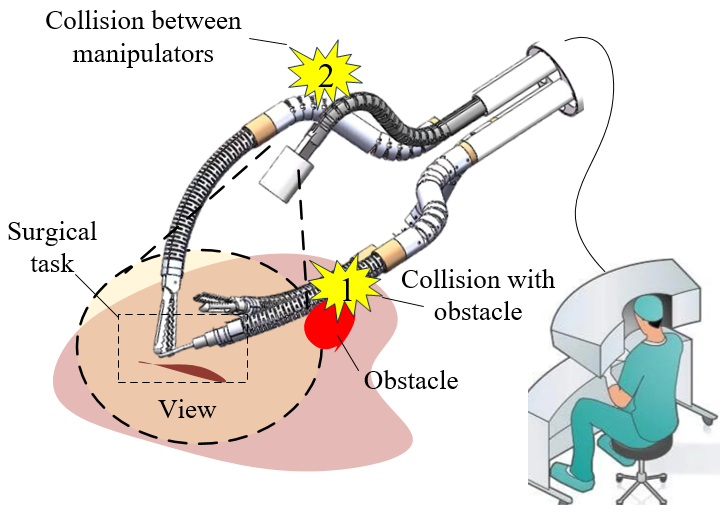
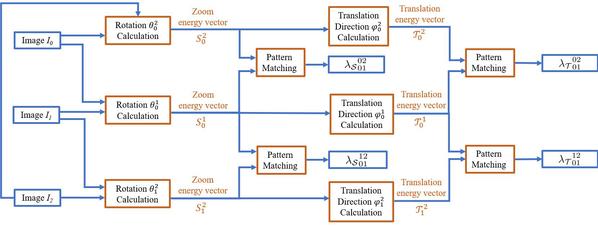
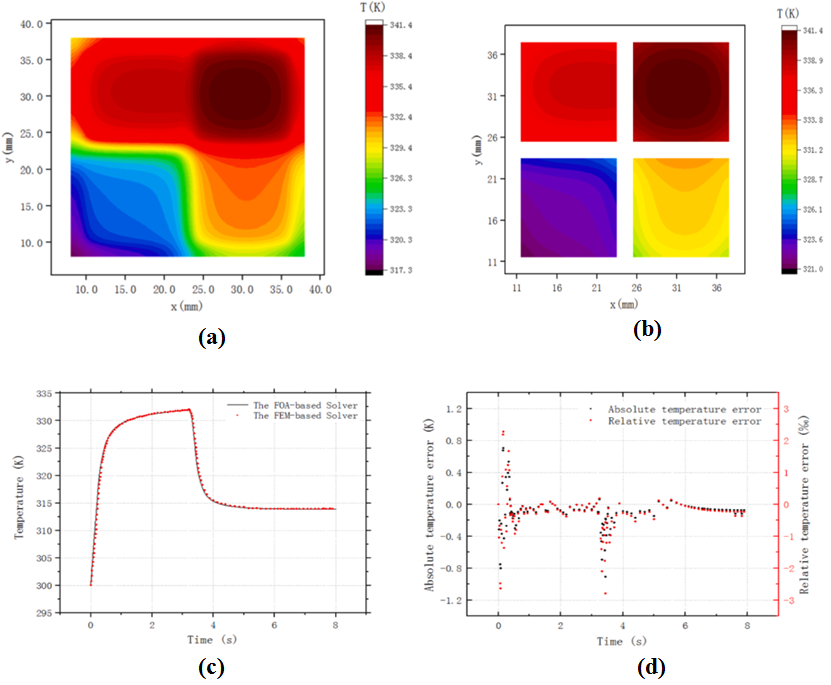
柔性温度-压力双参数传感器广泛应用于人体健康监测和智能机器人传感等领域,因而受到了广泛关注。然而,目前柔性温度-压力传感器基本都采用两种独立的传感材料实现双参数传感功能,这不仅提高了传感器的设计-集成难度,也增加了制造成本。因此,研发具有多功能一体化的先进传感材料成为本领域的研究重点和难点问题。碲化铋是一种能将热能直接转换为电能的半导体材料,其产生的电压与施加在材料两端的温差成正比关系,可用于温度...

近日,中国科学院上海微系统与信息技术研究所仿生视觉系统实验室李嘉茂研究员团队与路特斯机器人(LOTUS ROBOTICS)合作在智能驾驶感知领域取得了重要进展。
沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展(图)
连续体机器人 医疗机器人
2023/12/28
2023年12月28日,中国科学院沈阳自动化研究所刘浩研究员与友谊医院张忠涛教授在连续体机器人的主动避障控制方面研究取得新进展,相关成果以Active collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgery为题在The International Jo...
智能网联电动汽车节能优化控制研究进展与展望
智能网联 电动汽车 节能 优化控制
2023/12/20
提升纯电动汽车整车能效、降低百公里耗电量,是我国新能源汽车产业发展的重大需求.智能网联背景下,V2X(Vehicle to everything)网联信息以及激光雷达、毫米波雷达、摄像头、定位及导航装置等各类车载传感器,为智能网联电动汽车(Connected automated electric vehicle,CAEV)提供了全方位的信息交互、共享和状态感知能力,赋予了其巨大的节能优化潜力。

上海光机所在机器人抛光工艺研究中取得新进展(图)
机器人 抛光工艺 分析
2023/11/28
2023年11月28日,中国科学院上海光学精密机械研究所高功率激光元件技术与工程部在小磨头抛光工艺研究中取得新进展。研究首次提出数学模型补偿机器人抛光定位误差问题的方式,并取得了较好的误差补偿结果。相关研究成果以“Plug-and-play positioning error compensation model for ripple suppressing in industrial robot...
近日,上海科技大学信息学院自动化与机器人中心(以下简称STAR 中心)在视觉感知、机器人操控、视觉实时定位与建图(SLAM)等领域取得多项研究成果,相关论文被2023 IEEE/RSJ International Conference on Intelligent Robots and Systems(以下简称:IROS 2023)接收。
中国科学院微电子所在Chiplet热仿真模型及工具研究方面取得进展(图)
仿真模型 器件集成 系统芯片
2023/5/31
后摩尔时代,依靠缩小尺寸提升器件集成度的硅基CMOS技术面临物理原理和工艺技术的巨大挑战,具有高性能、低功耗和低成本优势的Chiplet技术成为延续摩尔定律的重要选择之一。该技术利用先进封装工艺,将多个异构芯片集成为特定功能的系统芯片,从而满足人工智能等领域的应用需求。但由于Chiplet异构集成密度大幅增加,热耗散问题对异构系统的可靠性造成严峻挑战。如何针对Chiplet异构集成系统的复杂性,提...
中国科学院理化技术研究所在仿生液态金属机电一体化器件研究方面取得进展(图)
仿生 液态金属 机电一体化
2023/5/26
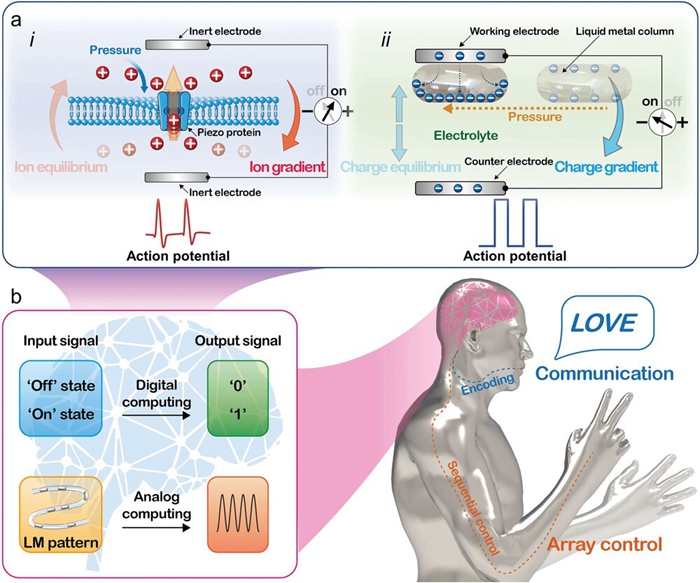
感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制,在此基础上,还可以演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面...

中国科学院理化所在仿生液态金属机电一体化器件研究方面取得进展(图)
仿生液态 金属 机电一体化
2023/5/26
感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制,在此基础上,还可以演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面...

感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制。在此基础上,演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面向人工...
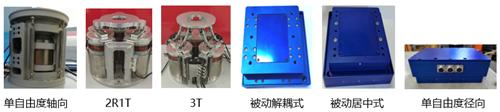
宁波材料所在磨抛机器人方面取得进展(图)
磨抛机器人 系统结构 氮气弹簧
2023/2/1
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...

2022年11月23日,2022世界智能制造大会发布了“2022世界智能制造十大科技进展”“2022中国智能制造十大科技进展”共20项智能制造科技成果。其中,中国科学院沈阳自动化研究所“变刚度薄壁复杂曲面零件机器人智能磨抛”技术入选“2022中国智能制造十大科技进展”。
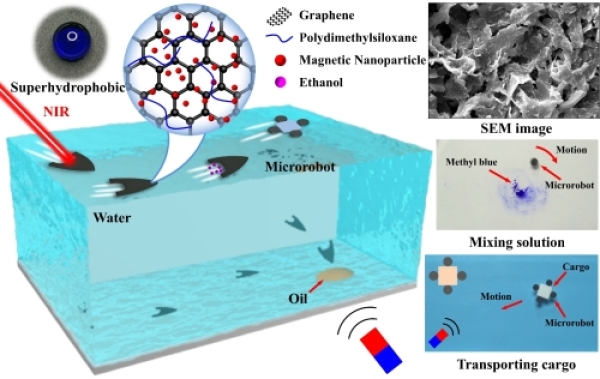
中国科学院沈阳自动化所微型机器人研究获进展(图)
沈阳自动化 微型机器人 驱动纳米机器
2022/12/1
超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家展开研究,探索这一特性在相关领域的应用前景,例如细胞操作、净化水源等。然而,目前大部分对于超疏水微型机器人的研究均是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到限制。

中国科学院沈阳自动化研究所微型机器人研究取得新进展(图)
微型机器人 中国科学院沈阳自动化研究所 水环境
2022/11/30
超疏水微型机器人可以在外界刺激下在水面上高效游动,围绕这一现象科学家们展开了诸多研究,探索它的这一特性在诸多领域的应用前景,例如细胞操作,净化水源等。然而,目前大部分对于超疏水微型机器人的研究都是围绕单一刺激的驱动模式,使得超疏水微型机器人的运动和功能在复杂的水环境中受到了限制。

机械臂运动学反问题的闭形式解取得进展(图)
机械臂运动学 反问题 闭形式解
2022/11/11
机械臂是目前应用最广的工业机器人。冗余机械臂是一类更加灵活、更适用于人机合作的工业机械臂,其运动学反问题与奇异性是机器人控制过程中的基础问题。数学机械化实验室李子佳副研究员与奥地利乔安娜研究所的Hofbaur教授等人合作,给出了一类冗余机械臂的运动学反问题的闭形式解。他们利用Gr?bner基等工具给出了详尽的机械臂运动奇异性分析。相关工作被机器人顶级期刊IEEE Transactions on R...