
搜索结果: 1-5 共查到“控制科学与技术 连续体机器人”相关记录5条 . 查询时间(0.127 秒)

微创、无创,是现代外科手术的总体发展趋势。微创手术机器人不仅让外科医生更好地控制手术器械、观察病灶及手术部位,还能降低医生疲劳,减少手术失误。本报告立足临床需求,首先从系统演进的角度介绍微创手术机器人的发展,总结各类使能技术的特点。其次,重点分析连续体手术机器人技术的临床应用研究,提出了连续性手术机器人系统框架图。最后,报告人介绍在连续体手术机器人领域的创新成果,并详细介绍最新发表的几篇论文的研究...
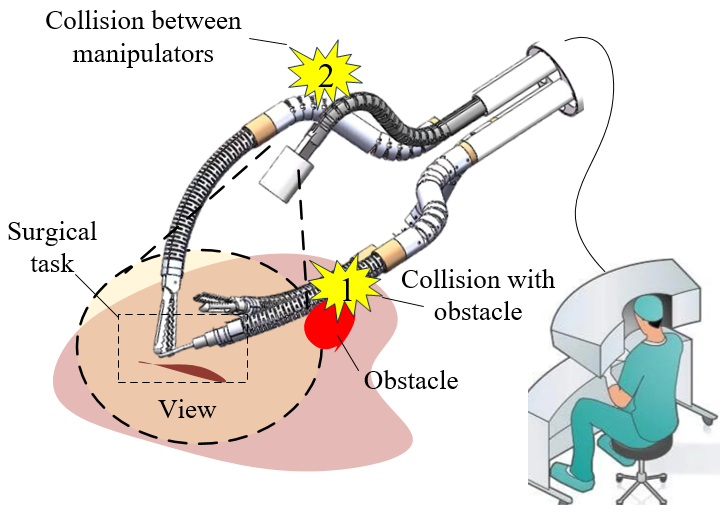
沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展(图)
连续体机器人 医疗机器人
2023/12/28
2023年12月28日,中国科学院沈阳自动化研究所刘浩研究员与友谊医院张忠涛教授在连续体机器人的主动避障控制方面研究取得新进展,相关成果以Active collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgery为题在The International Jo...

中国科学院沈阳自动化研究所在连续体机器人形状感知研究方面取得进展(图)
连续体 机器人 形状感知 腔镜手术机器人
2022/4/18
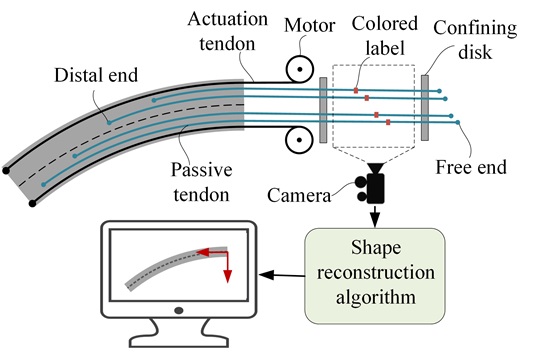
近日,中国科学院沈阳自动化研究所智能腔镜手术机器人研究组在连续体机器人形状感知方面研究取得新进展。相关成果发表在机器人领域期刊IEEE Robotics and Automation Letters上。
中国科学院沈阳自动化研究所在连续体机器人形状感知方面研究取得进展(图)
连续体机器人 形状感知 闭环控制 智能化应用
2022/4/14
近日,中国科学院沈阳自动化研究所智能腔镜手术机器人研究组在连续体机器人形状感知方面研究取得新进展。相关成果以Shape Sensing for Continuum Robots by Capturing Passive Tendon Displacements with Image Sensors为题发表在机器人领域期刊IEEE Robotics and Automation Letters。连续...
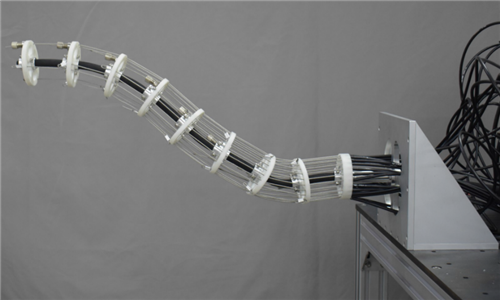
中国科学院宁波材料技术与工程研究所精密驱动与机器人团队利用了绳索的高效力传导以及具有本质柔性的特点,研发了具有多个关节模块的绳索驱动连续体机器人臂,绳驱动机器人臂采用多根轻质绳索协同驱动,与传统主动关节驱动的机器人臂不同,绳驱动机器人臂是由被动关节支撑,主动绳索驱动,由于主动绳索的驱动装置全都安装在机座上,因此绳驱动机器人臂具有自重轻、转动惯量小和易于实现变刚度控制等优点,既能够产生本质安全的运动...