
搜索结果: 106-120 共查到“控制科学与技术 进展”相关记录218条 . 查询时间(0.724 秒)

近日,空天信息研究院遥感科学国家重点实验室碳循环遥感研究室倪文俭研究员带领团队,在利用无人机航空立体影像进行森林结构参数调查研究方面取得重要进展。研究团队以机载激光雷达数据为参考,系统分析了影像获取的航向重叠度和空间分辨率对森林空间结构提取的影响,发现两者之间存在明显的耦合效应,揭示了无人机航空立体影像关键获取参数对森林空间结构探测的影响规律,为利用无人机航空立体影像进行森林空间结构探测提供了新的...

由此启发,中国科学院自动化研究所研究人员基于Brainnetome脑网络组图谱得到全脑功能连接特征,并结合先进的特征选择及稀疏回归的机器学习方法,对360名大学生的四种气质评分进行了个体化水平预测和多中心验证,预测值与真实值的相关性达到~0.6的水平。此外,结合HCP公共数据集中类似的人格特性指标,上述HA和NS对应的预测模型可以直接推广到新的数据集。如图所示,分别成功地预测情绪稳定性(neuro...

形状记忆微阵列研究获新进展(图)
形状记忆材料 微纳米阵列结构 液滴浸润特性调控
2018/9/10
近年来,微纳米阵列结构在抗冰、抗生物粘附及细胞操控等领域应用广泛。然而,传统的微阵列结构制备主要采用光刻技术,不仅制备成本高昂、工艺繁琐、耗时长久,而且所制备的微阵列结构在撤去外力后无法维持可控形变,极大限制了微阵列结构实际应用。为解决该问题,杜学敏博士研究团队在前期工作中通过仿生大自然中含羞草等植物可控形变特性(Advanced Materials, 2017, 29, 1702231;Adva...
近日,东南大学物理学院王金兰教授课题组通过结合机器学习(ML)技术和密度泛函理论(DFT),提出了一套智能化的材料设计新策略,成功预测了5000余种潜在有机无机杂化钙钛矿材料(HOIPs)的带隙,并且从中挑选出了多种环境稳定、带隙适中的无铅HOIPs太阳能电池材料。该研究成果在线发表在Nature子刊《自然•通讯》(Nature Communications)上,标题为Accelera...

2018年8月4日晚,云计算领域的国际旗舰会议SoCC 2018 (ACM Symposium on Cloud Computing 2018)评审结果揭晓。中国科学院深圳先进技术研究院数字所异构智能计算中心再次传来喜讯,刘琪骁博士和喻之斌研究员合作的论文The Elasticity and Plasticity in Semi-Containerized Co-locating Cloud Wo...

近日,国际学术期刊Biomaterials Science 以inside back cover的形式刊载了中国科学院沈阳自动化研究所微纳米课题组在体外类生命系统构建领域的最新成果。该研究基于光诱导微流控芯片,利用动态变化的数字光掩膜,实现了多维水凝胶结构的层层微制造,并且具备非紫外、快速、灵活、可重构的优点,为建立体外类生命系统、生物器官模型等奠定了基础。

中国矿业大学博士研究生在不确定调度方面取得重要进展(图)
中国矿业大学 博士研究生 不确定调度
2018/5/25
最近,中国矿业大学信息与控制学院博士研究生韩玉艳与巩敦卫教授等人合作,在国际顶级期刊《IEEE Transactions on Cybernetics》上发表题为“Evolutionary multi-objective blocking lot-Streaming flow shop scheduling with machine breakdowns”的学术论文,论文中主要讲解了关于不确定阻塞...
最近,我校博士研究生韩玉艳与信控学院巩敦卫教授等人合作,在国际顶级期刊《IEEE Transactions on Cybernetics》上发表题为“Evolutionary multi-objective blocking lot-Streaming flow shop scheduling with machine breakdowns”的学术论文,论文中主要讲解了关于不确定阻塞批量流水线调度...

近日,中国科学院深圳先进技术研究院生物医学与健康工程研究所微创中心穿戴式手术机器人项目组在信息融合领域取得新进展,相关成果Towards Characterization and Adaptive Compensation of Backlash in a Novel Robotic Catheter System for Cardiovascular Interventions近日被国际生物医学...

中国科学院自动化研究所仿生机器海豚定深运动控制研究获进展(图)
中国科学院自动化研究所 仿生机器 海豚 定深运动控制
2018/3/13
近日,中国科学院自动化研究所复杂系统管理与控制国家重点实验室研究员喻俊志带领的研究团队,提出一种基于视线导航法和滑模观测器的滑模模糊(SMFC)控制算法,解决了一类鳍肢机动型机器海豚的定深控制问题,相关研究成果发表在IEEE Transaction on Industrial Electronics上。该团队首先分析了机器海豚的定深控制机制,通过改变双侧鳍肢的偏转角来实现机器海豚的上浮/下潜,进一...
西北工业大学在国际高精度静电计领域取得新进展(图)
西北工业大学 高精度 静电计领域取得新进展
2018/1/26
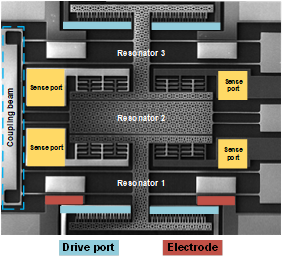
微机电系统(MEMS)领域的国际顶级会议暨第31届IEEE MEMS大会,于2018年1月21日至25日在英国贝尔法斯特召开。我校机电学院“空天微纳系统教育部重点实验室”常洪龙教授课题组共有5篇论文在会上进行了展示,其中论文“A Micro Resonant Electrometer with 9-Electron Charge Resolution in Room Temperature”经过大...
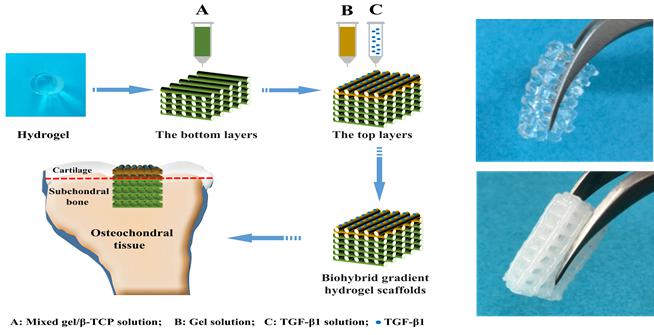
关节软骨本身没有神经及血管支配、且所含细胞量极少,损伤后很难实现自身修复。而且一旦软骨受到损伤,会累及软骨下骨,进而导致骨-软骨缺损。由于软骨和软骨下骨的生物学特性不同,导致骨-软骨一体化修复极具挑战。通常先分别制作骨和软骨组织仿生支架,再组装成骨-软骨一体化再生支架,往往在实际中骨与软骨之间的界面结合力比较弱,难以满足应用需求。因此,如何快速构建仿生骨-软骨再生修复的一体化再生支架具有较大挑战。

中国科学院深圳先进技术研究院在高分辨率超声成像领域取得重要进展(图)
高频超声换能器 压电材料 高分辨率医学图像
2017/12/27
中国科学院深圳先进技术研究院劳特伯医学成像研究中心郑海荣团队在高分辨率超声成像方向取得新进展。高分辨率超声主要采用大于15MHz的超声频率进行成像,可获得几十微米量级的成像分辨率。在临床中主要应用于浅表、内窥和眼科等方面的疾病检测。先进院医学超声团队在高频超声换能器、超声电子系统和成像方法等开展了多方位的研究工作,近期共有四项新技术发表在IEEE Transactions期刊上。

中国科学院宁波材料技术与工程研究所先进制造技术研究所精密运动与先进机器人团队最新研发的高速高精并联机器人,可以完成3T1R(三个平动一个转动)四个自由度的运动,实现了少自由度并联机器人的构型创新。在机构构型设计上,采用了独特的M型4-2-1并联机构构型设计,结构紧凑好、重心低,有效提高了系统的刚度和稳定性。研究团队通过机构运动学特性分析,发现该机构具有简单的正向和逆向运动学求解算法。在驱动设计上,...
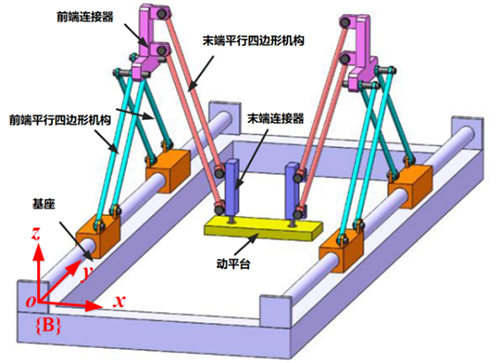
中国科学院宁波材料技术与工程研究所先进制造技术研究所精密运动与先进机器人团队最新设计的四自由度并联机器人,可以实现3T1R四个自由度的运动,是少自由度并联机器人的创新设计之一,其主要特点为2条相同支链通过被动转动副连接到动平台上,且每条支链有2个相同分支通过安装在基座上的移动副作为驱动。为进一步分析机构特点,采用螺旋理论验证了该机构自由度的数目及机构的运动学特性,得到了其位置的封闭解,根据机构的运...