
�������: 1-15 ���鵽��֪ʶ�� ���ա������ѧ���� ����������ؼ�¼222�� . ��ѯʱ��(0.18 ��)
���ӿռ价���´��ͺ�����������ѧ����ʵ��װ�������鷽����
���������������������Ӳ�������,���һ�ֻ���ǿ��ѧϰ�ľ��߷���,ʵ��������ָ��ʱ�̵ֽ��������ǵ��ض�����,�������Ƕ��߱�������������.����,��ֿ������Ǻ������ǵ�ȼ��Լ��������Լ������������Լ�����˶���ΧԼ����ʵ��Լ������,�����ΰ�ȫ�ӽ������Ӳ��Ĺ��̵���ѧģ��;���,Ϊ��������������Բ�ȷ�����ĶԿ�������������������,�Խ��˲����Ż�(Proximal policy optimizat...
��������������������������������λ�˿���ϵͳִ������������,�����һ��ֱ������Ӧ�ݴ����Ʒ���,��֤�����������ڷ���ִ���������µ������ȶ��ԺͶ�Ŀ��������λ��״̬�Ľ�����������.���ڶ�ż��Ԫ����������λ��һ�廯����ϵͳģ��,����,���������֪,��Ʊ�ƿ����ź�;Ȼ��,�������Ӧ�����ɶԱ�ƿ����ź��е�δ֪�������й���,��������Ӧ�����ź�;���,���ö�Lyapunov�����Զ����ģʽ�µ�ϵͳ����...
��������в��������������Ƽ����о�����
�����в��֪ �������߹滮 ����֪− ����− ִ�С�һ�廯 ������������������
2023/2/20
��ǰ,����ռ�����ӵ����̫�վ������ϼӾ�,��������ִ�мȶ�����ʱ�Ĺ����в����Ӧ������������µ���ս,ʹ�������������������Ƽ���ӭ���µķ�չ����.�ڵ��з����˹����в��֪���������߹滮����ܻ�������ִ�С���������ϵͳ�ܹ�����о���չ�Ļ�����,�ܽ��������в������������������ٵ���Ҫƿ������,������ָ����չ����֪−����−ִ�С�һ�廯�������ƽ�ƿ���������Ч�ֶ�,����һ�廯��...
�����������ϵ��������Ʒ����о�
���� �ϵ����� ��ӿ���� ��ӿ����
2022/9/30
�����ϵ�����㷺�����ڲ��û�е������Ϊ�����Ƶ�����ϵͳ�С������������ʱ��Ҫ���ڳ�����ӿ�����������ֵ����̬�������ٱ��������ش�ns�������������ϵͳΣ����ͨ�����������ϵ���������������Ա��˿����ϵ������볣����ӿ���������𣬷����˼��ֿ����ϵ��������Ʒ��������ӣ����ո�����һ��������Ʒ�����
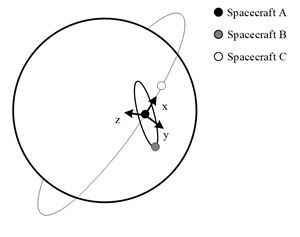
�й���ѧԺ���ҿռ��ѧ���Ŀ�����Ա���һ�ֽ��������λ��ʸ���۲����ݵı��������������λ������ͼ��
���λ�� ʸ���۲����� ��Ӻ����� ������λ
2022/2/21
����������о���������������Բ�����Ϣ����ʵ�ֱ�����������������������У������������Ծ�����Ϣ��ͨ�����������Dz����õ����������(LOS)��Ϣ��ͨ����ѧ��������õ����������������ṩ�Ĺ��Ի��������λ��ʸ��ת������������ϵ��ͨ����һ��ʱ���ڵ����λ��ʸ��������������������ȷ�����г�Ա�������ľ��Թ��Ҫ�ء����ַ�����Ҫ��������Ϣ���뵽����˲����У��Ӷ�ʵ�����������������Ҫһ�����ȵĺ�...
����˻�������ͼ����������̬Эͬ�����㷨,����ϵͳ�Ľ��ٶȺͿ������������н��Ե�Լ��.���ⲿ�Ŷ�����ʱ,���������Ӧ�㷨�����Ŷ����Ͻ�,�����˲��������ķ��������������뱥������,����������µ�����Ӧ��̬Эͬ�����㷨.��������ƵĿ����㷨,�������ȶ��Է���,֤����ϵͳ���м���ȫ�ֽ����ȶ���.��һ���ѿ����㷨�ƹ㵽ʱ��ͨ��ʱ�����,����������������һ������ʱ,��Ȼ�ܹ���֤���ϵͳ�ļ���ȫ�ֽ����ȶ���....
��������������������ȫ�ӽ��˹���Ͽ���
��������ȫ�ӽ� �˹���Ͽ��� �������� ������ײ ��ȫԼ������ ��ģ����
2019/3/15
��Դ����ⲿ�Ŷ�������������������ȫ�ӽ�������, ���Ŷ��Ͻ�δ֪ʱ, ���ڻ��ֻ�ģ������������˿� ���͵�����ʱ������Ӧ�˹���Ͽ�����. ����������ƹ����в��������͵ı��������������������˶���������� ֤�ӽ��������������İ�ȫ��, ͬʱͨ������ϵͳ������Ӧ�㷨�ֱ��������������Ŷ��Ͻ�δ֪. ����������ŵ�� ����֤�����ڿ�������������ϵͳ״̬������ʱ��������, ���ܹ���֤����������ʵ�ֺ�...
���������������������ⲿ���ź����뱥�͵����, ���������һ������������ٿ�����. �����ò����õ������λ����Ϣ, �����һ����ģ�۲�������������Խ��ٶ�, �����ݸù���ֵ�����һ��³������������. ͨ������һ������ϵͳ, �����뱥����������˷���. ����Lyapunov �ȶ�������, ֤���˱�������ĸÿ������ܹ���֤λ�ú��ٶȸ�������һ���н���. ���ͨ����ֵ������֤������Ƶ��������������...
���÷���·���滮�����������̰�ȫ����Խ�
����·���滮 ����Խ� �����Կ��� SOS�Ż� �����Թ滮 ���Զ����͵�������(LQR�CTrees)
2019/3/15
�����������뽻��Խӹ�������Ҫ���������, �Խ����ȵ�Լ��, �����������������������ٵķ���. ���� �о���һ�ֻ������Զ����͵�������(linear quadratic regulator trees, LQR�CTrees)����·���滮�İ�ȫ����Խӵ�·�� �滮����Ʒ���. ���Ȳ��÷����Թ滮�㷨(nonlinear programming, NLP)���㿪����ƹ켣, ��Ӧ�þֲ����Է����� ��...
��Կռ�۲���δ֪Ŀ����������Ŀ�������, ���������һ���·���. ���ڶ����Ĺ��Ʒ����͵�����С���� �㷨���߹������ʽ�������Ĺ��Բ���, ��ͨ��һ�ֻ��ڱ����ַ�����ֱ�Ӳ����������������̬����ϵͳ, �˷��� �����������IJ�����˫��������. ���ǵ������������ú����þ���IJ������, ����˾��ж�����Ͷ������ʽ�㶯�� ³�����Ʒ��䷽��. ���, ��ֵ��������֤�����᷽������Ч��.
���ڶ�̬��ģ���Ƶ�������������̬����
���Ժ����� ��̬�� ��̬��ģ
2019/3/15
���IJ��û���ģ̬���Ʒ����������������������̬������. ����, ��������������������ѧģ��. ����, �������������˶�ѧ���̲�����̬��Ԫ������. Ȼ��, ͨ�����붯̬�л�����, ��������������Ķ�̬��ģ��̬������. �ÿ������ܶԻ�ģ��̬���������ɷ��ź���������Ķ����������. ����Lyapunov����֤��������ƵĶ�̬��ģ��̬ ��������ʹ�ջ���������̬ϵͳ�ȶ�. ���, ͨ����ֵ����������֤��...
��ת���������ڲ�ȷ����ʱ, ���û���ģ̬���Ʒ����������������������̬������. ��������ģ̬�Dz��������, ���������һ������״̬�۲���������ģ̬���й���. ������ϻ�ģ���Ʒ���, ����˻��ڹ۲����Ļ�ģ��̬������. ����Lyapunov ����֤�����ڴ���ת��������ȷ����ʱ, ����ƵĻ�ģ��̬��������ʹ�ջ���������̬ϵͳ�ȶ�. ���, ͨ����ֵ����������֤���������������Ч��.
��Դ����������ʱ��ʱ�ӵĶ�������Эͬ��ӵ���̬һ��������, ��������˿������������ʱ��ʱ��Ӱ�첢�ܹ�ʵ�ֶ�������Эͬ�����̬���ٶ�һ�¼���̬����Ч���ٵľ�̬������. ���Ȼ�������ͼ���Ƶ����캽��-���������ϵͳ�Ķ�̬����, Ȼ��ͨ��������ʵ�Lyapunov���������ϵͳ����������ת��Ϊ�����Ծ���ʽ��Ĵ���������, ���ͨ��������Ծ���ʽ�����Эͬ�����̬����ϵͳ�ľ�̬���������. ��...
�����о��˷Ǻ���Ŀ��ǿ���Ʒɹ����д����ⲿ���źͲ�����ȷ�����Լ��������뱥��Լ���µ�������³���˹���Ͽ�������. ����, ������������ϵ�µĹ������ѧ���̺ͱ�������ϵ�µ���̬����ѧ����, ��������������ָ��Ҫ�������������˹���϶���ѧģ��. ���, ����˹����ģ��, ���ڷ���������˾��п�����������³������Ӧ�˹���Ͽ�����, �������ÿ����ͼ�������˱��Ͳ�����,���������Ӧ������δ֪�������Ŷ�...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...