
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ����������ؼ�¼40�� . ��ѯʱ��(0.091 ��)
�й���ѧԺ�Զ����о��������������ȶ���ɹ�������ҡ�ʮ���塱�Ƽ����³ɾ�չ
���������� ˮ�¼�� ȫ��ȫý���Ȩ����ʵʱ����Ʒ���ƽ̨ ��ģ̬ҽ�Ʒ�������������ϵͳ
2021/10/27
���գ����ҡ�ʮ���塱�Ƽ����³ɾ�չ�ڱ���չ���ݿ�Ļ��չ���ԡ�����������չ ����Ƽ�ǿ����Ϊ���⣬�ص�չʾ�ҹ�����ʵʩ����������չս�ԡ����贴��������ȡ�õ��ش�ɹ��� �й���ѧԺ�Զ����о���������������ȫ��ȫý���Ȩ����ʵʱ����Ʒ���ƽ̨����ģ̬ҽ�Ʒ�������������ϵͳ�����ܲ����������ϵͳ�ȶ���ɹ��μ���չ����

�й���ѧԺ�Զ����о�����������������Ч��������Ƶ������뷽�����������Ȼ��ѧ�����Ƚ���ͼ��
�й���ѧԺ�Զ����о��� �����������Ч��������Ƶ������뷽�� ������Ȼ��ѧ�����Ƚ�
2018/1/8
2018��1��8������,�й����롢����Ժ����������¡�ؾ��й��ҿ�ѧ����������ᡣ�������쵼��ϰ��ƽ�����ǿ���Ÿ�������������ϯ��ᲢΪ�����佱�����ǿ���������롢����Ժ�ڴ���Ͻ������Ÿ������ִ�ᡣ�й���ѧԺ�Զ����о���̷���о�Ա���������о�Ա������־�о�Ա�������о�Ա����˶�о�Ա��ɵ���Ŀ��������������Ч��������Ƶ������뷽�������2017��ȹ�����Ȼ��ѧ�����Ƚ���̷���о�Ա��Ϊ��...
һ��2���ɶ������ƽ���������������ת�������о�
�������������� 2���ɶ����� ˮ����ѧ���� ת������ Эͬ�ƽ�
2017/6/19
��2���ɶ������ƽ���������������Ϊ�����о����ڵ��������ƽ�����������Эͬ�ƽ����Լ�����������β��Эͬ�ƽ���3�������µ�ת�����ԣ����ȸ�����������β���������˶����ɣ���������3�������µ�ת��ˮ����ѧģ�ͣ�Ȼ��������ֵ���������˵��������ƽ�����������/β��Эͬ�ƽ�ʱ������ʵ�ָ����뾶ת�䣬�Լ���������Эͬ�ƽ�ʱ������ʵ��ԭ��ת������ԣ�����������Ӧ��ת��������ʵ������������������/β��Эͬ�ƽ�ʱ��...
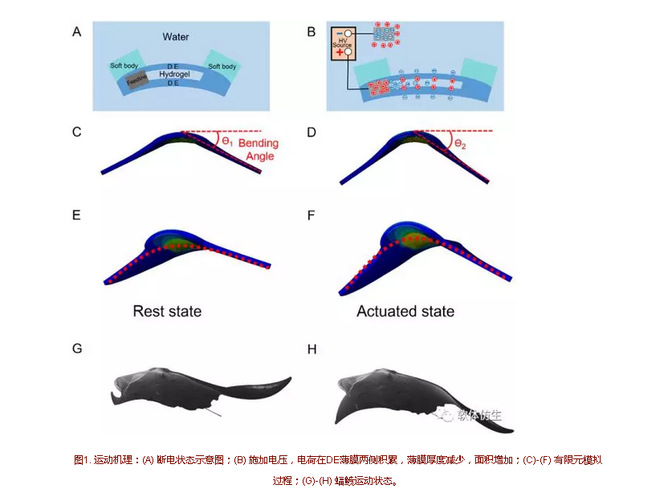
�����������������ѳ�Ϊ�����������һ�����š�����ڴ�ͳ��Ӳ�������ˣ������������ܹ�����ı�������״���ֿ���������Ӷ����и��õĻ�����Ӧ�ԡ�������������ĿǰҲ�����Ŷ��������ٶ����������Ѻ����������ܵȼ�����ս�����գ��㽭��ѧ���պ���ѧԺ���㽭ʡ���������������������о��ص�ʵ���������縱���ںͻ�־�����ڿ�����������ˮ�������˷���ȡ����Ҫ��չ��������һ�������������������������ڡ�Science A...
�ӻ�е�ṹ���˶�ģʽ�Ϳ���ϵͳ3 ��������ϸ��������������� �������̡���Ӱ���������ζ�����Ҫ��������ˮ�����飬����Matlab �Եõ���������ɢ������������������ϣ��� ����ͬ���Ʋ�����ͬһ����������Ӱ�졣ʵ���������������������������ʵ��9 ���˶�ģʽ������˳���л�ԭ ��ƵĶ����ζ�ģʽ��
�������ֺͱ߽Ǵ�����������Э������
ˮ��2VS2 ������ ���� �߽Ǵ���
2015/9/16
���ˮ��������ȫ���Ӿ�ˮ��2VS2 �����г��ֵ�ˮ��λ�ڱ߽ǵ�������������һ�ֻ��ڱ������ص� ���ֺͱ߽Ǵ�����Э���������ԡ�ͨ���Ա������صĻ��֣�������2 �����������Ը������������������ ����ʽ�����������˶�ģ�͡�����ˮ��λ��4 ���߽ǵ����⣬������3 ��Э����ʽ�����ף��ó�ִ�б߽Ǵ���ʱ ����1 �������������߽���1 ���������ε����ʵ�λ�ý��з��ص�Э������Ϊ���š���ˮ��������ƽ...

�й���31���ϼ������2014��10��30������ʱ163�죬ʤ����ɸ���ƿ�������2015��4��10�տ�����������ѧ��ѧԺ���ܿ���ʵ�������ƵĿ��ع�˫β�����������ϼ���������ʵ����ƽ���ζ���ʵʱ��ȡˮ�����ݡ����Ƿ����������̱������ɹ�����������ϼ��ġ�̽��֮�á���
ˮ��������2D����5VS5�����еĵ������
ˮ�л����� ���� 5VS5 Эͬ
2015/1/5
��Ա���ƽ̨ģ����ˮ���Ŷ���ʹ�õ�����Եı�д������ѵ����⣬Ϊ�˼���ˮ���Ե�����ԵIJ��� Ӱ�죬���ۺϵ������Ͷ���Эͬ������ԵĻ����ϣ����һ�ֶ��㽻��Эͬ���ԡ����õ����������ƣ������� �̾�����С��ǰ��������ȶ��ԣ�ͬʱ����ؽ�϶���Эͬ���Ե����ƣ�ʹ��С����Խ�Ϊ���ٵ�ǰ����ʵ���� �������ò����ܴ��ӿ�����ʵ�֣���������ʱ�䡣���㽻��Эͬ�����ܹ���Ч�ؼ������ƽ̨��ˮ���Ե���� ��...
���һ���ؽ��������ƽ��ٶȵĵ��ڣ����һ���˶�ѧ��ģ�����ƥ����Ƶ��·������Կɿ���ΪĿ�꣬�����˻�������ת��ϵ������β�ڶ��������ƽ��ٶ����ܲο�(SSPR)ģ�ͣ�ϵͳ��֪����������ת����������һ���ɿؿɵ��ڷ�Χ������Ӧ����ѧϰ���Ʋ�����֮ƥ�䣬����ʱ��ʶ�������Եظ��¸�ģ�͵�����ת��ϵ����ʵ����������İ��ˮ�����е��ƽ��ٶ��Ե��ڡ����������֤�˸�ģ�ͺͿ��Ʒ�������ȷ�ԡ�
�������ζ����ܸ��Ʒ���
������ �ζ����� ��β
2014/7/24
Ϊ��������������ƽ��ٶȺ��ƽ���������������β���Ĵ�С����״���и��ơ�ͨ������������������ �������̵õ�β������������Ĺ�ϵ������β��״����β������ȡ���β��С����β��Ӳ��4 ��������������β� ��solidworks �������β��״������2 ����Ӳ���²�ͬ��״���ζ��ٶȣ��õ������״����Ӳ�ȣ��ڴ������״�� �����ϸı仡����ȣ���ͨ��ʵ��ʵ��ȷ���������β��С������ʵ�������������������ζ�����...
���������2D �����������ս���ر�������һ�ֻ��ڵ������䷨�������������Ż����ԡ����÷��� ��������ȫ����λ�ͷ��泡�ص�����������Ŀ�����壬�ܿ��˳���ȱ����ɵ���������г��ֵ��쳣���������� �����Ż�����������ս�����ܳ�ֿ��DZ������صĵ��μ���������ˮ���ʵʱ��Ϣ���ڲ�ͬ������ִ�в�ͬ�IJ� �ԣ��ɼ�ǿ�����������������������
�ڴ�ͳ�Ļ���51 ��Ƭ���Ķ�����Ʒ����У��Զ��ռ�ձȿ��Ʋ���ȷ�����������⡣��Ը��������һ �ֶ�·������̿����㷨��ʵ���˶Զ���ĵ�ƽ�ı�ʱ���ռ�ձ�ʱ����о�ȷ���ơ�������������е����ƽ̨�� �ڴ˻����ϴ�Ӳ��������������������߿���ģ���·������ͨѶ���������ƣ��������������������������� ����ơ���������������ϵͳ���еͳɱ������ġ������ܡ���ʵ�ֵ����ơ�
2D����������Э�����ײ���
��������� ������ ������� �������
2013/7/31
���Ŀǰ���ڶ��ڶ�ˮ��������Э�����о����ٵ����⣬���һ��˫���ЧЭ�����Ʒ������ӳߴ����ء� ����ѧ���غͿɿ�������3 ���Ƕ���ϸ�о��˱���ƽ̨����Ҫ�����ص㣬�����խ�������ص㣬�������ˮ������ ��ͷ���翹���ͷ����3 �����������ֱ����ٶȺ��ȶ���Ϊ���ص㣬���ʵ�����ٶ����Ȳ��Ժ��ȶ������� ���ԣ����ֱ��2 �ײ��Խ�����ʵ����֤��ʵ����������2 �����Եijɹ��ʶ��ﵽ100%�������֮��...
���2D ����������1vs1 �����в��õĴ�ͳ���ԵIJ��㣬���һ���µ�ģ�����Ʋ��ԡ��ڷ���Ŀǰ���� ���Դ��ڵ�����Ļ����ϣ�����������ˮ��֮���ڸ���λ�ú;���������з������������˸ò��������������ͳ ���Ե��ŵ㡣ʵ������������ò��Ա�д�ı���������ʵ��Ӧ����ȡ���˽Ϻõ�Ч����
��Զ�������ϵͳ��һ�������⣬���һ�ֻ���һ�������۵Ķ���������ӿ���ģ�͡�����һ�������� �˽ṹ�Ķ���������ӿ���ģ������������֮�����Ϣ������ʽ��������ģ���µ���������ȡ�ý���һ���Ե������� ��Ӧ�õ��캽�ߡ�������ģʽ�µı�ӿ����У�������Ķ���ת��Ϊ��һ��һ���ľֲ����쵼�C���桱��ϵ������Ŀ ��������ˮ��������2D ����ƽ̨�Ͻ��з���������������������ñ�������ڶ�����������ϵͳ������...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...