
搜索结果: 1-10 共查到“控制科学与技术 高性能”相关记录10条 . 查询时间(0.299 秒)
中国石油大学本科生宫礼坤在Journal of Materials Chemistry A 发表高性能柔性可穿戴湿度传感器及其在人体生理检测中的应用的科研成果(图)
微纳湿敏传感器可穿戴电子领域大学生创新创业
2021/2/26
2021年2月,中国石油大学理学院理科实验班专业2017级本科生宫礼坤的科研成果《运动驱动交流发电机自供电氧化铈/石墨氮化碳纳米复合材料柔性可穿戴湿度传感器及其在人体生理检测中的应用》(Flexible wearable humidity sensor based on cerium oxide/graphitic carbon nitride nanocomposite self-powered...
中国石油大学(华东)控制科学与工程学院本科生李博论在Sensors and Actuators: B. Chemical发表高性能湿敏传感器构建及其呼吸检测应用的科研成果(图)
中国石油大学(华东)控制科学与工程学院 本科生 李博论 高性能 湿敏传感器 呼吸检测应用
2019/10/12
近日,我院自动化专业2016级本科生李博论的科研成果《基于氧化铟纳米立方体修饰氧化石墨烯纳米片的高灵敏度便携电容型湿度传感器及其可穿戴呼吸检测应用》(High sensitivity portable capacitive humidity sensor based on In2O3 nanocubes-decorated GO nanosheets and its wearable applic...

2018年12月18日,高性能复杂制造国家重点实验室第二届学术委员会暨指导专家组第二次会议在长沙市召开。实验室学术委员会主任熊有伦院士、副主任谭建荣院士、钟掘院士、桂卫华院士及指导专家组蔡鹤皋院士、段正澄院士、朱荻院士、杨华勇院士、丁汉院士等26位委员和专家出席了会议。实验室学术带头人与骨干成员参加了会议。校领导易红、周科朝等出席了会议,易红书记代表依托单位致欢迎辞。学术委员会和指导专家组肯定了实...
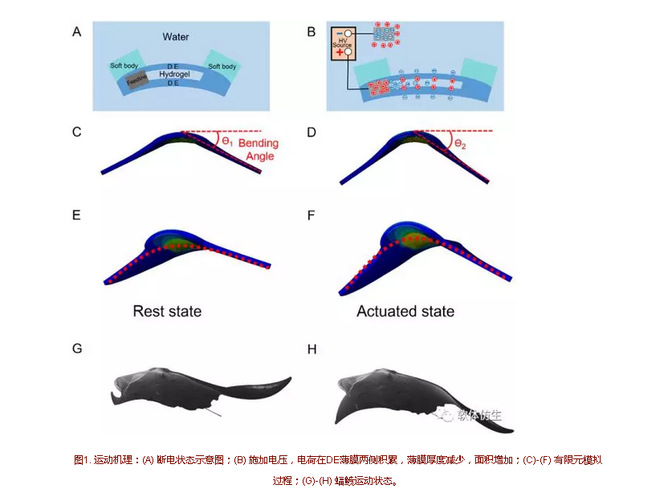
仿生软体机器人现已成为机器人领域的一大热门。相比于传统的硬质机器人,软体机器人能够任意改变自身形状、抵抗外界冲击,从而具有更好的环境适应性。但软体机器人目前也面临着动力弱、速度慢、控制难和无法独立供能等技术挑战。近日,浙江大学航空航天学院、浙江省软体机器人与智能器件研究重点实验室李铁风副教授和黄志龙教授课题组在软体水下机器人方面取得重要进展,开发出一款高性能软体仿生机器鱼,并在《Science A...

研华科技,2012年7月―― 全球领先的创新嵌入式产业电脑&自动化解决方案提供厂商研华科技隆重推出新一代PC-based软件运动控制方案:PCI-1245 (4轴DSP架构步进/脉冲型伺服电机控制通用PCI卡)与PCI-1245E (经济型4 轴 DSP架构步进/脉冲型伺服电机控制通用PCI卡)。相比于以专用芯片(ASIC-based) 为主的解决方案,PCI-1245/1245E导入研华自主技术...
高性能机器人系统的理论与实验研究
协调操作 冗余度 柔性机器人
2008/12/3
该项目建立了柔性冗余度机器人协调操作各种负载的动力学模型,给出了其正、逆动力学问题的控制算法,提出了协调作业的过程振动及余振的抑制方法,进行了动力学仿真,分析了设计参数对系统动力学性能的影响及规律,提出了针对协调作业的柔性机器人协调操作系统的设计准则和优化策略,从实验角度进行了柔性冗余度机器人协调操作系统的研究。这些研究取得了突破性进展,为全面开发这一领域奠定了坚实基础,具有重要的理论意义和应用价...
高性能与大型柔性机器人手臂的机电一体化设计
机电一体化 柔性机器人 机械臂 优化设计
2008/10/8
“高性能与大型柔性机器人手臂的机电一体化设计”的主要目的是基于机电一体化,建立一个高性能与大型柔性机器人系统的设计方法与计算程序,并进行实验验证。本项目的重点是在机电一体化设计中引入同时设计(Concurrent Design)的概念和方法,从设计的第一步开始就对手臂的力学模型,驱动器动力特性,传感器的性能与定位,以及控制算法的确定进行综合并整体优化,进而实现系统的最优设计和控制。这种方法与技术原...
高性能机器人控制系统的研究
机器人控制器 协调控制 汉字编程示教盒 监控系统
2008/7/21
本文介绍了高性能机器人控制器的研制情况.该系统具有较高的控制精度,可
完成对机器人和多个外部轴的协调控制.为便于国内用户使用,实现了中文界面功能键驱动
的汉字编程示教盒.为适应机器人生产线的需要,提供了丰富的联网功能和生产线监控诊断
功能.目前该系统已用于新松公司的6kg工业机器人产品中.
高性能运动控制在数控系统中的应用综述
2007/12/13
Abstract分析了在高速高精度加工中设计高性能运动控制器时存在的问题及面临的挑战,评述
了高性能数控系统运动控制器设计方法的发展现状,对存在的主要问题和今后可能的发展方向作了进一步的探讨.
银河高性能分布仿真系统的设计和实现
2007/7/28
期刊信息
篇名
银河高性能分布仿真系统的设计和实现
语种
中文
撰写或编译
作者
金士尧,党岗,凌云翔,王召福,刘晓建
第一作者单位
刊物名称
计算机研究与发展
页面
38(4):458~466,2001.4
出版日期
2001年
4月
日
文章标识(ISSN)
相关项目
分布强实时系统调度算法的研究