
ЫбЫїНсЙћ: 1-15 ЙВВщЕНЁАПижЦПЦбЇгыММЪѕ аТНјеЙЁБЯрЙиМЧТМ57Ьѕ . ВщбЏЪБМф(0.606 Уы)
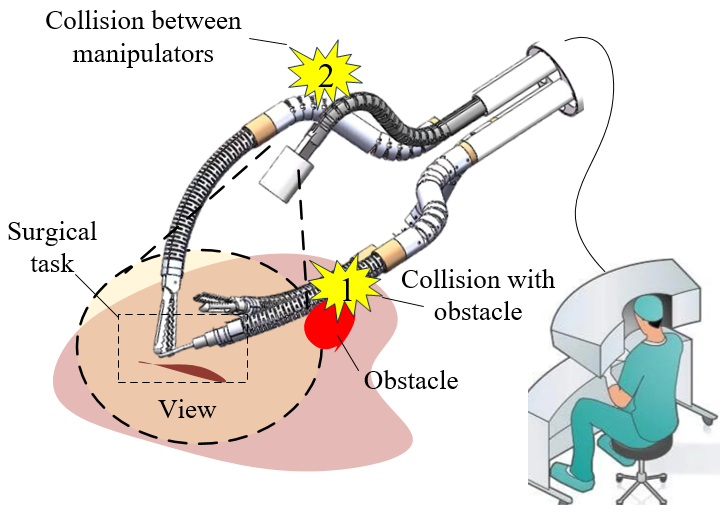
2023Фъ12дТ28ШеЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљСѕКЦбаОПдБгыгбвъвНдКеХжвЬЮНЬЪкдкСЌајЬхЛњЦїШЫЕФжїЖЏБмеЯПижЦЗНУцбаОПШЁЕУаТНјеЙЃЌЯрЙиГЩЙћвдActive collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgeryЮЊЬтдкThe International Jo...

2023Фъ11дТ28ШеЃЌжаЙњПЦбЇдКЩЯКЃЙтбЇОЋУмЛњаЕбаОПЫљИпЙІТЪМЄЙтдЊМўММЪѕгыЙЄГЬВПдкаЁФЅЭЗХзЙтЙЄвебаОПжаШЁЕУаТНјеЙЁЃбаОПЪзДЮЬсГіЪ§бЇФЃаЭВЙГЅЛњЦїШЫХзЙтЖЈЮЛЮѓВюЮЪЬтЕФЗНЪНЃЌВЂШЁЕУСЫНЯКУЕФЮѓВюВЙГЅНсЙћЁЃЯрЙибаОПГЩЙћвдЁАPlug-and-play positioning error compensation model for ripple suppressing in industrial robot...
ЩЯКЃПЦММДѓбЇаХЯЂПЦбЇгыММЪѕбЇдКздЖЏЛЏгыЛњЦїШЫжааФдкЪгОѕSLAMЁЂЛњЦїШЫВйПиЁЂЪгОѕИажЊЕШСьгђШЁЕУаТНјеЙЃЈЭМЃЉ
ЪгОѕSLAM ЛњЦїШЫВйПи ЪгОѕИажЊ
2023/9/8
НќШеЃЌЩЯКЃПЦММДѓбЇаХЯЂбЇдКздЖЏЛЏгыЛњЦїШЫжааФЃЈвдЯТМђГЦSTAR жааФЃЉдкЪгОѕИажЊЁЂЛњЦїШЫВйПиЁЂЪгОѕЪЕЪБЖЈЮЛгыНЈЭМЃЈSLAMЃЉЕШСьгђШЁЕУЖрЯюбаОПГЩЙћЃЌЯрЙиТлЮФБЛ2023 IEEE/RSJ International Conference on Intelligent Robots and SystemsЃЈвдЯТМђГЦЃКIROS 2023ЃЉНгЪеЁЃ

жаЙњПЦбЇдКРэЛЏММЪѕбаОПЫљдкЗТЩњвКЬЌН№ЪєЛњЕчвЛЬхЛЏЦїМўбаОПЗНУцШЁЕУаТНјеЙЃЈЭМЃЉ
ЗТЩњвКЬЌН№Ъє ЛњЕчвЛЬхЛЏ ИажЊЛњаЕДЬМЄ
2023/5/24
ИажЊЛњаЕДЬМЄВЂНЋЦфзЊЛЏЮЊЩњЮяЕчаХКХвдЭъГЩаХЯЂИажЊЁЂДЋЕнКЭМЦЫуЃЌЪЧздШЛНчЖЏЮяЩњДцКЭНјЛЏЕФЛљБОЩњРэЛњжЦЁЃдкДЫЛљДЁЩЯЃЌбнЛЏГіИїжжИїбљЕФгУвдгІЖдИДдгЖрБфЛЗОГЕФжЧФмааЮЊЃЌШчаХЯЂДІРэЁЂбЇЯАЁЂХаЖЯЁЂЗДРЁЕШЁЃдкВИШщЖЏЮяЬхФкЃЌЛњаЕДЬМЄИажЊЕФРызгЭЈЕРЕААздкВЛЭЌзщжЏЦїЙйЕФЛњаЕИаОѕКЭзЊЕМжаЗЂЛгзХживЊзїгУЁЃЭЈЙ§РызгЭЈЕРЁЂЯИАћФЄЪмЬхКЭЯИАћФкаХКХЭЈТЗЃЌНЋЛњаЕДЬМЄзЊЛЏЮЊЩњЮяаХКХЃЌВЂБЛЯИАћЪЖБ№ИажЊЁЃФЃФтЩЯЪіЕФЩњЮяжЧФмааЮЊЪЧУцЯђШЫЙЄ...

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЮЂаЭЛњЦїШЫбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
ЮЂаЭЛњЦїШЫ жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљ ЫЎЛЗОГ
2022/11/30
ГЌЪшЫЎЮЂаЭЛњЦїШЫПЩвддкЭтНчДЬМЄЯТдкЫЎУцЩЯИпаЇгЮЖЏЃЌЮЇШЦетвЛЯжЯѓПЦбЇМвУЧеЙПЊСЫжюЖрбаОПЃЌЬНЫїЫќЕФетвЛЬиаддкжюЖрСьгђЕФгІгУЧАОАЃЌР§ШчЯИАћВйзїЃЌОЛЛЏЫЎдДЕШЁЃШЛЖјЃЌФПЧАДѓВПЗжЖдгкГЌЪшЫЎЮЂаЭЛњЦїШЫЕФбаОПЖМЪЧЮЇШЦЕЅвЛДЬМЄЕФЧ§ЖЏФЃЪНЃЌЪЙЕУГЌЪшЫЎЮЂаЭЛњЦїШЫЕФдЫЖЏКЭЙІФмдкИДдгЕФЫЎЛЗОГжаЪмЕНСЫЯожЦЁЃ
ФЯЗНПЦММДѓбЇЛњаЕгыФмдДЙЄГЬЯЕЭѕКъЧПЭХЖгдкЛљгкОВЕчЮќИНЕФVRзАжУСьгђШЁЕУаТНјеЙ
ЭѕКъЧП ОВЕчЮќИН VRзАжУ ШЫЛњНЛЛЅ
2022/6/15
НќШеЃЌФЯЗНПЦММДѓбЇЛњаЕгыФмдДЙЄГЬЯЕИБНЬЪкЭѕКъЧПЭХЖгдкЛњЦїШЫСьгђЦкПЏIEEE Transactions on Robotics ЃЈT-ROЃЉЩЯЗЂБэСЫвЛЦЊЙигкОВЕчЮќИНСІЗДРЁVRЪжЬзЕФбаОПТлЮФЁЃ ТлЮФЬтЮЊ ЁА So-EAGlove: VR Haptic Glove Rendering SoftnessSensation With Force-Tunable Electrostatic Adhesive ...

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЮЂФЩУзПЮЬтзщдкЮЂФЩЩњЮяжЦдьгыВйПиСьгђбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
ОЋзМвНбЇ вьжЪЮЂЩњЮя РрЩњУќЛњЦїШЫ
2022/5/24
НќШеЃЌBiofabricationЃЈжаЙњПЦбЇдКвЛЧјTOPРрЃЉПЏдиСЫжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЮЂФЩУзПЮЬтзщдкЮЂФЩЩњЮяжЦдьгыВйПиСьгђЕФзюаТбаОПГЩЙћBubble-based microrobots enable digital assembly of heterogeneous microtissue modulesЁЃ

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкГЄајКНСІAUVЖрбЇПЦгХЛЏЗНУцШЁЕУаТНјеЙЃЈЭМЃЉ
ЫЎЯТЛњЦїШЫ ГЄајКНСІ AUV
2022/5/23
НќШеЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкГЄајКНСІAUVЃЈзджїЫЎЯТЛњЦїШЫЃЉЕФЛљДЁбаЗЂЗНУцШЁЕУаТНјеЙЃЌЯрЙиГЩЙћвдЁЖЛљгкЖрбЇПЦгХЛЏЩшМЦПђМмЕФГЄКНГЬзджїЫЎЯТЛњЦїШЫИХФюЩшМЦЁЗЮЊЬтЗЂБэдкКЃбѓЙЄГЬСьгђвЛЧјTopЦкПЏOcean EngineeringЩЯЁЃ

жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкЕЅЯИАћЮЂФЩЩњЮяЬНВтЗНУцбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
ЮЂФЩВйзїЛњЦїШЫ ЕЅЯИАћСІбЇЬиадЬНВт ГЌЮЂСПвЉЮяЕнЫЭ
2022/2/22
НќШеЃЌЮвЙњЩњУќПЦбЇСьгђжЊУћSCIЦкПЏЁЖЩњЮяЛЏбЇгыЩњЮяЮяРэНјеЙЁЗ(2022, 49(2): 420-430)вдЗтУцЮФеТЕФаЮЪНЗЂБэСЫжаЙњПЦбЇдКЩђбєздЖЏЛЏЫљЮЂФЩУзздЖЏЛЏПЮЬтзщРћгУЮЂФЩВйзїЛњЦїШЫдкЕЅЯИАћСІбЇЬиадЬНВтЗНУцЕФзюаТбаОПГЩЙћ(Combining micropipette and atomic force microscopy for single-cell drug delivery and si...
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкПеМфЛњЦїШЫзджїВйПибаОПЗНУцШЁЕУаТНјеЙЃЈЭМЃЉ
ПеМфЛњЦїШЫ дкЙьВЖЛё дкЙьМгзЂ жЧФмПижЦ ПеМфШЫЛњНЛЛЅ
2022/1/14
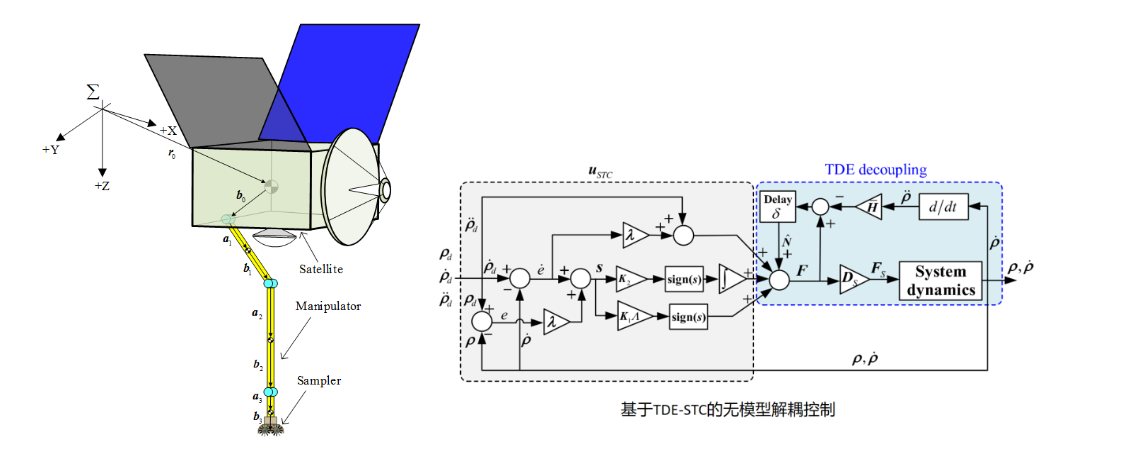
2022Фъ1дТЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкПеМфЛњЦїШЫзджїВйПиЗНУцШЁЕУСЫаТНјеЙЃЌеыЖдКНЬьЦїЦНЬЈКЭЛњаЕБлЕФЖЏСІбЇёюКЯЬсГіСЫвЛжжЛљгкЪБбгЙРМЦЕФЮоФЃаЭНтёюПижЦЫуЗЈЃЌЯрЙиГЩЙћвдТлЮФаЮЪНЃЈAttitude Decoupling Control of Semifloating Space Robots Using Time-Delay Estimation ЃсЃюЃф Supertwisting ControlЃЉ...
МЭжОМсНЬЪкЭХЖгдкШКЬхЯЕЭГИДдгадбаОПжаШЁЕУаТНјеЙ
ШКЬхЯЕЭГФмПиад ЭМРэТлЬиеїПЬЛ ЭиЦЫНсЙЙ ЯЕЭГФмПи
2021/12/27
НќРДЃЌЧрЕКДѓбЇздЖЏЛЏбЇдКЪЁЭЛЙБзЈМвЁЂЪЁНмЧрМЭжОМсНЬЪкЫљДјСьЕФбаОПЭХЖгдкПижЦгыМЦЫуЛњСьгђЖЅМЖЦкПЏЁЖIEEE Transactions on CyberneticsЁЗЗЂБэГЄЦЊбаОПТлЮФСНЦЊЁАThe complexity in complete graphic characterizations of multiagent controllabilityЁБЁЂЁАThe graphical condition...
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкжЧФмЕчЭјДѓЪ§ОнЗНУцбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
ЕчСІЫ№КФ жЧФмЕчЭјЪ§ОнЗжЮі ЯпЫ№ТЪ ЕчЭјЗўЮёжЪСП
2021/12/9
2021Фъ12дТЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљБпдЕМЦЫуПЮЬтзщдкжЧФмЕчЭјДѓЪ§ОнЗжЮіСьгђШЁЕУаТНјеЙЃЌЖдДѓЙцФЃЕчСІЪ§ОнНјааСЫЪБгђКЭПеМфгђзлКЯЗжЮіЃЌбаОПГЩЙћЗЂБэдкEnergy reportsЃЈгАЯьвђзгЃК6.87ЃЉЁЃЕчСІЫ№КФвЛжБЪЧжЧФмЕчЭјЪ§ОнЗжЮіСьгђЕФШШЕуЃЌЯпЫ№ТЪЪЧКтСПЕчСІЫ№КФКЭЕчЭјЗўЮёжЪСПЕФживЊжИБъЃЌНЕЕЭЯпЫ№ЪЧЕчСІПЩГжајЗЂеЙЕФЙиМќЁЃФПЧАДѓЖрЪ§баОПЪЧЛљгкРэТлЪ§ОнЛђЩйСПЪЕМЪЪ§ОнЃЌКмЩйгаДѓЙцФЃЪЕМЪЪ§ОнЕФбаОПЁЃетИі...
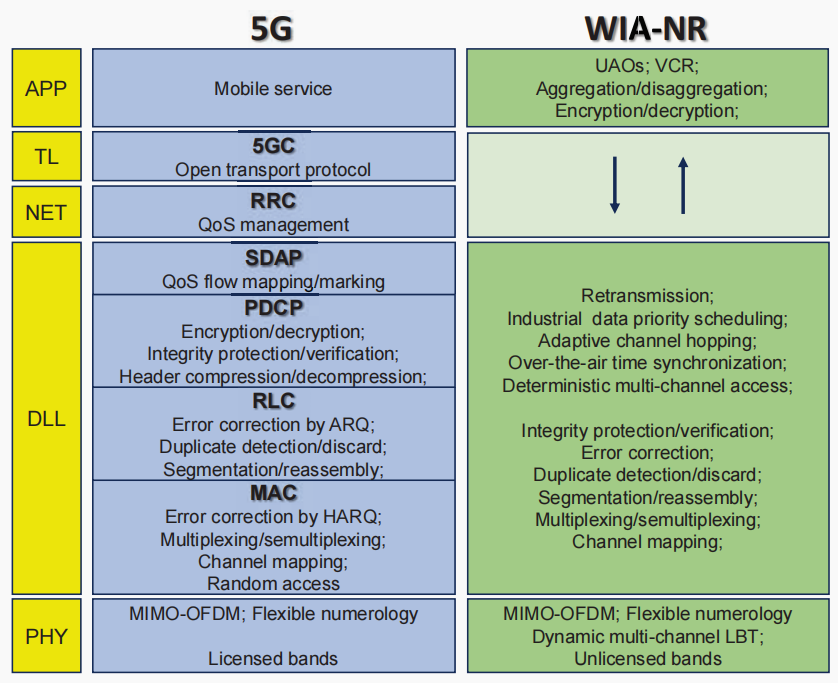
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкЙЄвЕ5GЭјТчЗНУцбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
5GММЪѕ ЙЄвЕПижЦ WIA-NR вЦЖЏЭЈаХ ЙЄвЕздЖЏЛЏ
2021/10/25
2021Фъ10дТЃЌЭјТчЭЈаХСьгђЙњМЪжјУћбЇЪѕЦкПЏIEEE NetworkЃЈжаПЦдКвЛЧјTOPРрЃЉПЏдиСЫжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљЙЄвЕ5GЭХЖгЕФзюаТГЩЙћWIA-NRЃКUltra-Reliable Low-Latency Communication for Industrial Wireless Control Networks over Unlicensed BandsЁЃ5GММЪѕЕФПьЫйЗЂеЙЮЊЙЄвЕПижЦЬсГі...
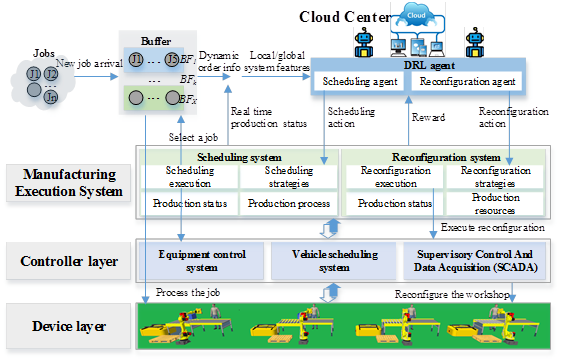
жаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкЛљгкЩюЖШЧПЛЏбЇЯАЕФГЕМфжЧФмЕїЖШЗНУцбаОПШЁЕУаТНјеЙЃЈЭМЃЉ
ЩюЖШЧПЛЏбЇЯА ГЕМфЕїЖШ НБРјКЏЪ§ зДЬЌПеМф ааЮЊПеМф
2021/10/19
2021Фъ10дТЃЌжаЙњПЦбЇдКЩђбєздЖЏЛЏбаОПЫљдкГЕМфжЧФмЕїЖШЗНУцбаОПШЁЕУаТНјеЙЃЌЛљгкЩюЖШЧПЛЏбЇЯАЗНЗЈЪЕЯжСЫЖЏЬЌЖЉЕЅЯТПЩжиЙЙГЕМфЖдЖЏЬЌЩњВњЕїЖШКЭГЕМфжиЙЙЕФЪЕЪБгХЛЏКЭжЧФмОіВпЃЌбаОПГЩЙћЗЂБэдкInternational Journal of Production ResearchЁЃгЩгкГЕМфЕїЖШЮЪЬтДѓЖрЪєгкNPФбЮЪЬтЃЌДЋЭГдЊЦєЗЂЪНЫуЗЈжЛФмдкЖрЯюЪНЪБМфФкЧѓЕУНќгХНтЁЃЖдДѓЙцФЃЮЪЬтЃЌдЊЦєЗЂЪНЫуЗЈЕФЧѓНтЪБМфФбвдТњзу...

ФЯОЉХЉвЕДѓбЇЙЄбЇдКЭѕгРНЁИБНЬЪкдкЗЧДЋЭГВФСЯЖЯСбЗТецЗНЗЈШЁЕУаТНјеЙЃЈЭМЃЉ
ЭѕгРНЁ ЗЧДЋЭГВФСЯЖЯСбЗТец
2021/9/14
ЖЯСбЪЧВФСЯЗЂЩњЦЦЛЕЕФжївЊаЮЪНЃЌЕЋЪЧЖдгкЗЧДЋЭГВФСЯЕФЖЯСбЗТецбаОПНЯЩйЁЃ2021Фъ9дТ14ШеЃЌЭѕгРНЁИБНЬЪкдкЁЖTransactions of Nanjing University of Aeronautics and AstronauticsЁЗЗЂБэЬтЮЊЁЖDetermination of the Key Cohesive Zone ModelЁЏs Parameters for the Orthotrop...
жаЙњбаОПЩњНЬг§ХХааАё-Ьѕ
- е§дкМгди...
жаЙњбЇЪѕЦкПЏХХааАё-Ьѕ
- е§дкМгди...
ЪРНчДѓбЇПЦбаЛњЙЙХХааАё-Ьѕ
- е§дкМгди...
жаЙњДѓбЇХХааАё-Ьѕ
- е§дкМгди...
ШЫЁЁЮя-ЦЊ
- е§дкМгди...
ПЮЁЁМў-ЦЊ
- е§дкМгди...
ЪгЬ§зЪСЯ-ЦЊ
- е§дкМгди...
баеазЪСЯ -ЦЊ
- е§дкМгди...
жЊЪЖвЊЮХ-ЦЊ
- е§дкМгди...
ЙњМЪЖЏЬЌ-ЦЊ
- е§дкМгди...
ЛсвщжааФ-ЦЊ
- е§дкМгди...
бЇЪѕжИФЯ-ЦЊ
- е§дкМгди...
бЇЪѕеОЕу-ЦЊ
- е§дкМгди...