
搜索结果: 1-5 共查到“控制科学与技术 深度强化学习”相关记录5条 . 查询时间(0.196 秒)

第七届深度强化学习理论与应用研讨会顺利召开(图)
算法应用 交通信号控制 无人系统
2023/1/11
2023年1月5-6日,第七届深度强化学习理论与应用研讨会顺利举行。活动聚焦深度强化学习(DRL)与博弈、自动驾驶和机器人等方向的前沿进展与最新成果开展研讨交流,并邀请4位领域专家分别从“小样本强化学习算法及应用的研究进展”,“基于深度强化学习的交通信号控制进展”,“无人系统分布式协同控制”,“基于深度强化学习的智能电网新能源高效利用”等不同主题进行了精彩分享。报告环节在线上平台进行同步直播,吸引...
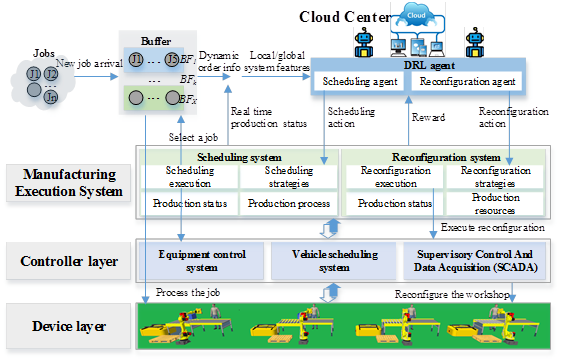
2021年10月,中国科学院沈阳自动化研究所在车间智能调度方面研究取得新进展,基于深度强化学习方法实现了动态订单下可重构车间对动态生产调度和车间重构的实时优化和智能决策,研究成果发表在International Journal of Production Research。由于车间调度问题大多属于NP难问题,传统元启发式算法只能在多项式时间内求得近优解。对大规模问题,元启发式算法的求解时间难以满足...
基于深度强化学习的双足机器人斜坡步态控制方法
准被动双足机器人 深度强化学习 步态控制 步行稳定性
2021/8/20
为提高准被动双足机器人斜坡步行稳定性,本文提出了一种基于深度强化学习的准被动双足机器人步态控制方法.通过分析准被动双足机器人的混合动力学模型与稳定行走过程,建立了状态空间、动作空间、episode过程与奖励函数.在利用基于DDPG改进的Ape-X DPG算法持续学习后,准被动双足机器人能在较大斜坡范围内实现稳定行走.仿真实验表明,Ape-X DPG无论是学习能力还是收敛速度均优于基于PER的DDP...

中科院自动化所深度强化学习团队提出了一种基于深度强化学习的未知环境自主探索算法,能够使机器人在没有先验的环境中自主探索,并实时构建环境地图。论文发表在2020年IEEE TNNLS上[1]。未知环境探索是指机器人在没有任何先验知识的情况下,在一个新的环境中通过移动而建立完整环境地图的过程,反映了机器人系统的自主决策能力和对环境的适应性,是机器人领域的一个热点问题。它在实际中有着广泛的应用场景,如救...