
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� �ռ����������ؼ�¼56�� . ��ѯʱ��(0.11 ��)
�й���ѧԺ�����Զ����о������ռ�����������ٿ��о�����ȡ���½�չ��ͼ��
�ռ������ �ڹ첶�� �ڹ��ע ���ܿ��� �ռ��˻�����
2022/1/14
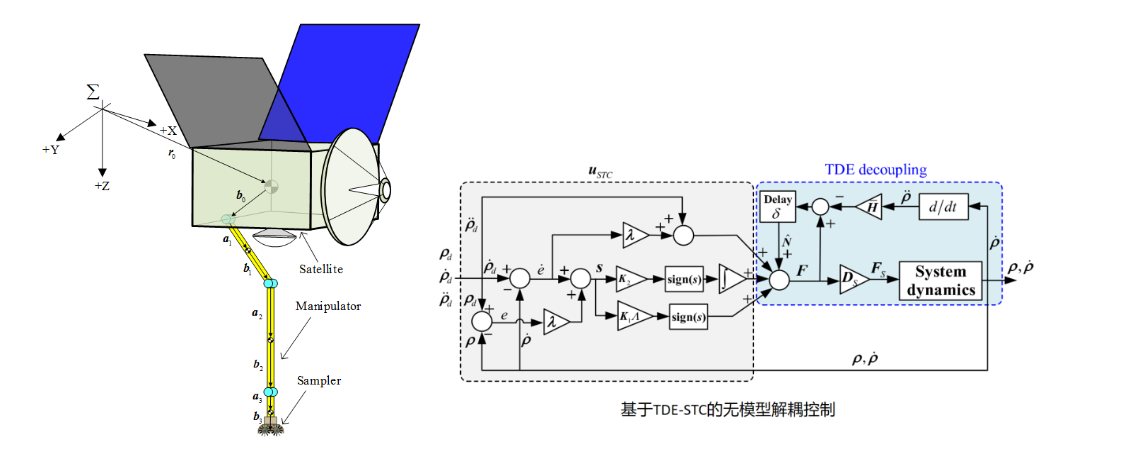
2022��1�£��й���ѧԺ�����Զ����о������ռ�����������ٿط���ȡ�����½�չ����Ժ�����ƽ̨�ͻ�е�۵Ķ���ѧ��������һ�ֻ���ʱ�ӹ��Ƶ���ģ�ͽ�������㷨����سɹ���������ʽ��Attitude Decoupling Control of Semifloating Space Robots Using Time-Delay Estimation ���� Supertwisting Control��...
�й���ѧԺ�����Զ����о����ռ�������������������ռ�վ��������ѧʵ��˳����չ
��������ʵ�� �����˼��� ��������ѧʵ�� �Ӿ�������ϵͳ
2021/6/7
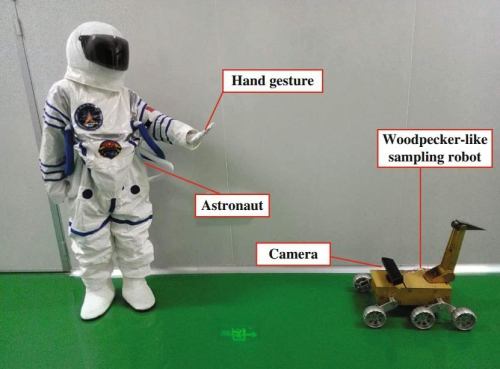
��������ʵ��ϵͳ�Զ�����/�ͷŻ������Ӿ�������ϵͳ����Ҫʵ�ֶ�����ʵ��̨������̵��������ڹ���Զ��������ظ��������Լ�����ʵ��̨���ڷ������������ȹ��ܣ���ȷ������ʵ��ϵͳ��ɿ�ѧʵ��ĺ��ı���ϵͳ�� �Զ������ͷŻ�����������������8�㡰�г�ʽ�����ͣ������˶���Χ��ռ���ռ�С�����������ߡ�����ɵ������˶����ȸߵ��ص㡣�����Զ������ͷŻ�������ң��ָ�ʵ���Զ��������Զ��ͷż�ָ��λ��פͣ����...

��ǿ���䡢�����¡�����ա�������̫�ջ����У��ռ���������Դ����Э������Աȥִ���ռ������뺽��Ա��λ��ҵ��ȣ��ռ�������ڳɱ�����ȫ���Լ���ҵʱ��ȷ�������������ơ������������ٿؼ������ռ�������о���Ҫ����ĺ��ļ��������ռ������ƶ�Ŀ����ڹ����Ϊ����Ŀ��ɿ������Ǻ�����������ļ���������
�й���ѧԺ�����Զ����о����ռ�����������ٿؼ����о�ȡ���½�չ��ͼ��
�й���ѧԺ�����Զ����о��� �ռ������ �����ٿؼ���
2020/5/12
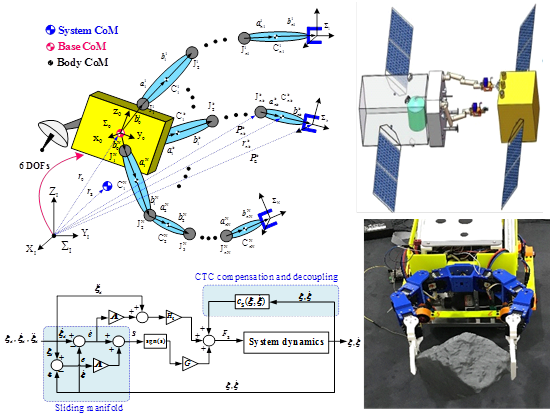
���գ�������ѧ�����ص�ʵ���ҡ��п�Ժ���ռ������ٿش��½����Ŷӡ����о���Ա����Բ��߱�ץ���������ռ��Ǻ���Ŀ�꣬�����һ�����������������ԡ��IJ�������سɹ������ڻ�е���������ڿ�IEEE/ASME Transactions on Mechatronics (DOI: 10.1109/TMECH.2019.2952552)�� ��ǿ���䡢�����¡�����ա�������̫�ջ����У��ռ���������Դ����...
�ռ������˫�۲�����������̬�����������ԽӲ���һ�廯ELM���������
�ռ������ ˫�۲��� ����ϵͳ ��̬���� �����ԽӲ��� ELM������
2017/9/20
�������ռ������˫�۲�����������̬���������ԽӲ�����Э���������⣮���ȣ����ó����������ջ�Լ�����μ��˶�ѧ��������˲����������������ϵͳ�Ķ���ѧ���̣��������˻����ϵͳ�ܵ��ij��ЧӦ����Σ���Բ��������ϵͳ��̬�����˶��������ԽӲ������Ա��������ϵͳ����˻��ڼ���ѧϰ����ELM��������Ӧ��������Ʒ���������ѧϰ������ѧϰ�ٶȿ졢��������������Ȩֵ���ŵ㣬�����ڱƽ�ϵͳ��δ֪��...
�й���ѧԺ�����Զ����о������ռ���������������о�ȡ���½�չ��ͼ��
�й���ѧԺ�����Զ����о��� �ռ������ �˻�����
2017/8/24
���գ���ʮ��������������Ӧ�ù��ʻ��飨���ICIRA 2017�����人��Ļ���˴λ����ɻ��пƼ���ѧ������Ȼ��ѧ����ίԱ�����Ͼٰ죬�ԡ�������������Ϊ���⣬�漰������������ˮ�����������ռ���������˻������������Ӿ���14�����⣬700��λ������λ��߹�ͬ�����о��ɹ��������ڼ䣬�й���ѧԺ�����Զ����о�������������Ա�μӻ��鲢���������档�����Զ������ռ��Զ����о��Ҹ��졢�������д������Stati...
�����������Ե��ռ���������ڸ��Ź۲�����L2��������
�ռ������ ������ȷ�� ���Ź۲��� �������� L2��������
2016/5/4
�о�������λ�ü���̬�����ܿ�ʱ�ռ�������ڹ����ռ��еĹ켣��������.���ǵ�ϵͳ���ڲ�����ȷ�����������Ե�����������һ�ֻ��ڸ��Ź۲�����L2�������Ʒ���.����������շ��̺�ϵͳJacobi��ϵ������ϵͳ�Ķ���ѧģ��.���ø��Ź۲�����ϵͳ��ģ�����й۲ⲹ������ͨ��L2�������Ʒ��Թ۲�������������ͬʱ��������ģ����������ϵͳ����������ɵ�Ӱ����в���.�ÿ��Ʒ�������ҪԤ֪ȷ�Ĺ��Բ��������öԹ�...
���ô�ͳ�IJ����ȸ����������ռ�������Ŀɲ����ȣ��ر��ǻ��������۵����ЧӦ�������е�۵IJ����ȵ�Ӱ�졣�������û�����̬��С�Ŷ��Ϳɲ�����ָ��Զ����������е�۵Ĺ��ͽ����Ż�������ƽ��˫���ռ������������ֵ���棬���������ЧӦ�Կɲ����ȵ�Ӱ���Լ��ڶ�۹����Ż��е�Ӧ�á��������������ĵ��о������������ָ���ڹ�����еĽ�����˫��Э�����ᡢ���ԽӺ�ץ�����������н�ǿ�Ĺ���Ӧ�ü�ֵ����

2015��8��17�գ����й�����Ƽ����Ź�˾���й��ѧ��������רҵίԱ���������ҵ��ѧ������������ϵͳ�����ص�ʵ���ҹ�ͬ�����2015���ռ���������ڹ����ר�����ֻ��ڹ��������С������Ƽ��빤ҵ��ϵͳ����һ˾��˾���ű��죬��У������ȫ��У��������ϲ���������ϯ���ֻᡣ
�о���Ư�������Թؽ�˫���ռ������������̬���е�۹ؽ�Э����λ�Ŀ����ر��Ϳ������������������⡣����ϵͳ�����غ㶨�ɼ��������շ���,����������̬�ܿ����Թؽ�˫���ռ����������ȫ����ʽ����ѧ���̡�������Բ����������㶯����,�Ƶ�ϵͳ��Ӧ�������㶯ģ�͡�Ϊʵ��˫�۸��ؽ���������Ч����,��Կ����ϵͳ���һ��������״̬�������Ʋ���;Ϊ�����ռ������ʵ��������̬����ϵͳ���ؽ�����������ֿ��Ʊ�����...
Ϊ���ռ�������ؼ��㷨������֤��������������һ��һ�廯����ϵͳ����ϵͳ����ģ�黯���˼�룬��ң��ң�ؽӿڡ��켣�滮����ơ�ϵͳ����ѧģ�͡�ϵͳ3D����ģ�͡��������ģ�͡�ͼ������λ�˲�������ײ����밲ȫԤ����ģ����ɡ����У�3Dʵ��ģ�ͼ����泡����OSG(Open Scene Graph)���������ؼ�ģ����㷨����C���Ա��ʵ�֣��ɶ��ռ������ִ���ڹ�����Ĺؼ��㷨���бջ���֤���������ֵ���...
���Թؽ�-���Ա��ռ������������������Ӧ���ݿ��Ƽ�˫������������
���Թؽ����Աۿռ������ ����ѧģ�� ��˹��������������� ���ݿ����㷨 �ؽ����Բ���������
2013/5/21
�ռ������ϵͳ��������Ҫ�������ռ�������ı۸˺����Ӹ��۸�֮��Ľ¹ؽڡ������ռ������ϵͳ�ṹ�ĸ����ԣ������о���Ա��ͬʱ�������Թؽں����Ա۵�ϵͳ��ע������Ϊ��̽���˲���δ֪���Թؽ�-���Ա��ռ������ϵͳ�Ķ���ѧģ�⡢�켣���ٿ����㷨��ƺؽڡ��۸�˫�������������������⡣���ȣ����ö��嶯��ѧ��ģ���������Ư�����ռ���������е��߶����ͽǶ����غ㶯��ѧ���ԣ��Ƶ���ϵͳ�Ķ���ѧ���̡��Դ�Ϊ����...
����˫���ռ����������ѧ��ģ���غɻ��ڻ�ģ��������/λ�û�Ͽ���
Ư���� ����˫�ۿռ������ ��ģ���� ��/λ�û�Ͽ��� ����ѧ
2011/5/25
����������λ�á���̬�����ܿ�������£�Ư��������˫���ռ������ץ��ϵͳ�Ķ���ѧ��ģ��������⡣�����������շ�����ţ��-ŷ�����ֱ�����˫���ռ��������ץ�ָ��صĶ���ѧģ�ͣ������Ư�����ռ���������еĶ���ѧ���Լ��պ���Լ�����ι�ϵ�������ץ��ϵͳ�ϳɶ���ѧ���̡��Դ�Ϊ���������ǵ�����˫���ռ������ϵͳ�ṹ�ĸ����Լ�ijЩ�����ı䶯�ԣ����ݾ��н�ǿ³���Եı�ṹ�������ۺ�Lyapunov�ȶ������ۣ���...
�������ɷ����ռ���������������Ļ������������Ŀ���ȡ�Ĺ����б�Ȼ��������е���˶��ͻ���Ӱ������»����ĸ����˶���������������ɷ����ռ������λ�˵�����ģ��PD�㷨�����ݽ��յ���ʵʱλ����Ϣ���ռ���������������ص�����������̬��λ����У��λ������֤Ŀ����ȶ��������ÿ�����ʵ��ƽ̨�봫ͳ��on/offʽ������������ʵ��Աȣ���֤�˴˷������ȶ��ԡ����ƾ��Ⱥ�ȼ�������϶��нϺõı��֡�
���ڶ���ʽ��ֵ������Ư���ռ�������켣�滮����Ⱥ�Ż��㷨
����Ư�� �ռ������ ����ʽ��ֵ ����Ⱥ�Ż��㷨 �������˶��滮
2011/4/15
�������Ư���ռ�������켣�滮���⣬���һ�ֻ��ڶ���ʽ��ֵ������Ⱥ�Ż��㷨���ϵķ������˶��滮���������ȣ�ͨ����ϵͳ������Լ���������з������������Ի�е�۹ؽڽǺ�ɢ��ΪĿ�꺯���Ĺ켣���ſ����㷨�������ø߽���ʽ��ֵ�����ƽ���е�۹ؽڽǹ켣������ֵ����ʽ��ϵ����Ϊ�Ż��������������Ⱥ�Ż��㷨�Թؽڽǹ켣�����Ż���⡣��Ա�������Ĺ켣�滮�㷨������ֵ���档�����������ؽڽǹ켣ƽ����������֤...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...