
搜索结果: 1-15 共查到“控制科学与技术 高精度”相关记录34条 . 查询时间(0.233 秒)
基于扩展PI抗扰补偿器的高精度时间同步控制
扩展PI抗扰补偿器 零极点优化/时间同步 网络控制系统 周期性扰动
2023/12/20
高精度时间同步是任务关键型工业网络控制系统的核心支撑技术,针对工业环境中普遍存在周期性振动等扰动信号导致晶振频率漂移,影响时间同步精度的问题,基于扩展比例积分(Proportional integral,PI)观测器,提出一种新型的抗扰补偿器结构,用于消除周期性扰动的影响,并构建了相应的精细抗干扰反馈控制方法,用于实现高精度时间同步。

中国科学院深圳先进技术研究院等发展出电热效应的局域尺度高精度直接测量方法(图)
电热效应 局域尺度 高精度测量方法
2019/11/18
电热效应在固态制冷领域具有巨大的应用潜力。与传统的制冷方式比较,基于电热效应的固态制冷具有环保、效率高、易小型化、无机械振动等优点。当前,电热效应的测量以间接方法为主,其可靠度深受质疑,而直接表征方法相当缺乏,尤其无法实现局域电热效应的测量,如此极大限制了电热效应材料的开发和结构的优化设计,进而制约了电热效应的实际应用。

中国仪器仪表网|艾默生推出高灵敏度、高精度无线雷达液位变送器(图)
艾默生 无线雷达液位变送器 无线技术
2019/4/19
近日,艾默生推出 Rosemount™ 3308导波雷达(GWR)无线液位变送器高性能版本,成为首个符合API 18.2标准(可为小型储罐原油贸易交接提供指导)的独立无线雷达液位设备。Rosemount™ 3308导波雷达(GWR)无线液位变送器是艾默生助力数字化转型技术、软件和服务产品组合Plantweb™ 数字生态系统的一部分。 该变送器具备精度高,且无需打...
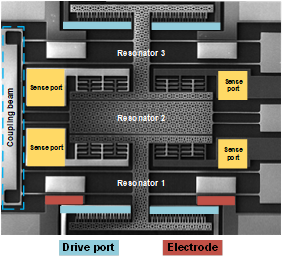
西北工业大学在国际高精度静电计领域取得新进展(图)
西北工业大学 高精度 静电计领域取得新进展
2018/1/26
微机电系统(MEMS)领域的国际顶级会议暨第31届IEEE MEMS大会,于2018年1月21日至25日在英国贝尔法斯特召开。我校机电学院“空天微纳系统教育部重点实验室”常洪龙教授课题组共有5篇论文在会上进行了展示,其中论文“A Micro Resonant Electrometer with 9-Electron Charge Resolution in Room Temperature”经过大...
一种Zernike矩的高精度板材尺寸测量方法
边缘检测 钢板尺寸 Zernike矩 亚像素
2014/10/22
目前技术条件下,对于大视场的高精度边缘测量而言,工业级面阵CCD传感器的分辨率难以满足要求.文章针对钢板尺寸测量系统,首先介绍了测量环境和工作原理.继而在Zernike矩以及Zernike矩亚像素精度边缘检测原理的基础上,提出了适用于钢板尺寸测量的亚像素精度边缘检测算法.该算法不仅具较好的抗噪性能和检测精度,而且在传统界定边缘点的阈值处理方法上进行了改进,使边缘受限于单个像素的宽度范围内,能够实现...
应用FFT的高精度FMCW雷达频率测量算法
频率测量 FFT高精度 频谱校正 LabVIEW
2013/8/26
采用快速傅里叶变换(FFT)对调频连续波(FMCW)雷达差频信号进行频谱分析时,存在栏栅现象和能量泄漏的问题。为了提高频率测量精度,提出了一种离散频谱能量重心法与截断长度调整相结合的频率测量算法。能量重心法利用功率谱主瓣内的谱线估计主瓣中心的位置,解决了栏栅现象;在采样信号时域整周期截断后,离散频谱能量泄漏较小,可更精确地估计信号频率。结果表明,该算法频率测量精度高,实现简单,可应用于FMCW雷达...
针对里程计(OD)刻度系数误差和惯导安装误差角对车载捷联惯导(SINS)/OD组合导航系统的影响,重新推导并建立了新的量测方程,在此基础上加入故障检测的方法,从而构成了新的组合导航算法。该组合导航算法能够有效地提高组合导航精度,及时准确地检测出量测故障;同时该组合导航算法同样适用于车辆运动学约束辅助导航模式,为OD发生故障时提供了一种容错方案。仿真结果验证了该算法的有效性。
基于高增益观测技术的高精度感应电机磁链观测器研究
微分同胚变换 高增益观测器 矢量控制 磁链观测
2013/1/18
针对感应电机磁链观测的一般方法具有观测精度不高、使用的电机参数多、易受影响等问题, 利用非线性微分同胚变换对感应电机强耦合非线性系统进行转化, 提出一种基于高增益观测技术的感应电机磁链观测器. 该观测器不需要满足状态能观的条件且计算量小, 通过调节增益能够达到任意精度误差. 对非线性规范型的高增益观测器进行了稳定性分析, 证明了收敛性. 仿真和实验结果验证了该观测器的高观测精度和所提方法的可行性和...
介绍了几种用于光纤陀螺光源的高精度温度控制的脉宽调制(PWM)工作方式,并分析了这几种工作方式的驱动转换过程。对于脉宽调制方式引入的电磁干扰问题,详细分析了转换交越过程中的输出信号及频谱。研究发现,在脉宽调制工作的交越过程中,输出信号的频率和脉宽是复杂的、无规律的,其谱线位置发生了随机的、不可预测的变化,功率分布不再符合周期矩形脉冲谱特性。针对这种交越随机频谱引入的电磁干扰,提出了几种有效的解决方...
研究了一种利用捷联惯导、星敏感器和北斗接收机进行长航时高精度组合导航的方法。对捷联惯导系统误差、星敏感器安装误差、北斗定位误差分别进行建模,将星敏感器输出的载体姿态角、北斗接收机输出的载体位置与捷联惯导输出的对应参数分别相减作为量测,推导获得组合导航量测方程。针对长航时环境下可能面临量测噪声统计特性的不确定问题,采用简化的Sage\|Husa自适应滤波算法进行组合导航滤波设计。仿真结果表明,该组合...
转子式高速高精度弹体尺寸动态测量系统
高速转子 无损检测 位移补偿 滤波
2010/5/10
对转子式高速高精度弹体尺寸动态测量系统进行设计。介绍该系统的设计原理、系统模型和控制系统的设计方法,采取位移补偿、滤波算法等在软件上对现场采集的各种信号进行处理,并在样机上进行实验验证。结果表明,弹体尺寸的检测速度可达到并超过200发/min,检测精度可以控制在0.01 mm以内,远远超过国内80发/min生产节拍。
高精度音频多位sigma-delta调制器设计
sigma-delta调制器 开关电容积分器 高精度 多位
2009/9/12
设计一个内部采用4位量化器的二阶单环多位sigma-delta调制器。为解决反馈回路中多位DAC元件失配导致的信号谐波失真问题,该sigma-delta调制器采用CLA(Clocked averaging algorithm)技术提高多位DAC的线性度,同时采用动态频率补偿技术增加积分器的稳定性。调制器信号频率带宽为24 kHz,过采样率(OSR)为128,采用尺寸为0.5 µm的CM...
手部路径跟踪和关节轨迹规划是机器人应用领域中一个非常重要的课题。在以往的研究中,往往是通过在设定的路径上增加节点数和路径分段数来提高机器人手部跟踪设定路径的精度,但这种方法会导致在线计算量大幅度增加。针对这一缺陷,提出了一种新的实时高精度路径跟踪与关节轨迹规划方法。该方法通过在设定的手部路径上按一定规则额外选取多个附加节点,使每一轨迹段上的节点数由2个增加到4个,并利用1个3次多项式、1个正弦函数...
机动滑翔飞行器的自抗扰反步高精度姿态控制
非线性控制 反步法 扩张状态观测器 鲁棒性
2009/6/5
从分析一种新型的临近空间机动滑翔飞行器的自身特点出发,将反步法和扩张状态观测器相结合,提出自抗扰反步姿态控制器的结构。通过改进的反步法设计标称模型的非线性控制,避免了内外环分离的假设,同时能够处理不匹配的不确定性。通过在反步法中引入指令滤波器和修正误差信号,使得伪控制量的导数可以轻易获得,简化了设计。利用非线性扩张状态观测器实时准确地估计大的快变的不确定性,并进行控制补偿,使控制器的鲁棒性和性能得...