
搜索结果: 226-240 共查到“航空、航天科学技术”相关记录19283条 . 查询时间(0.431 秒)

北京理工大学自动化学院博士生导师王美玲教授(图)
北京理工大学自动化学院 博士生导师 王美玲 教授 智能导航
2023/3/2
王美玲,女,北京理工大学自动化学院博士生导师、教授。研究方向:1.智能导航(无人系统、机器人);2.多源/全源导航定位;3.新型导航传感技术(角加速度直接测量及应用)。

北京理工大学自动化学院硕士生导师郎啸宇教授(图)
北京理工大学自动化学院 硕士生导师 郎啸宇 教授 航天器姿态动力学
2023/3/2
郎啸宇,男,北京理工大学自动化学院教授、硕士生导师。研究方向:1.航天器姿态动力学与控制;2.空间挠性结构分布式控制。

郑晨光,天津大学精密仪器与光电子工程学院博士生导师、教授。课题组聚焦于高级认知功能的神经解码与调控研究,具体为:1.空间导航、学习记忆、社交、奖赏等功能的神经集群编码模式与神经节律(theta和gamma)的调节机制研究;2.决策功能在线解码与闭环调控的神经接口研究;3.神经退行性疾病(如阿尔茨海默症)和精神类疾病(如抑郁症)的神经编码损伤机制及物理调控研究。主要技术:多通道清醒在体电生理、光遗传...

A yearslong effort to launch Cornell-made satellite technology into a neighboring solar system is making a terrestrial stop at the Intrepid Sea, Air and Space Museum in New York City.
据管道&天然气杂志网2月21日报道,美国联合航空公司(UnitedAirlines)推出了一项超过1亿美元的投资基金,以支持专注于研究和生产可持续航空燃料(SAF)的初创企业。
中国载人航天工程三十年成就展中国国家博物馆开幕
载人航天 成就展 中国国家博物馆
2023/2/26
为充分展示中国载人航天工程30年发展成就,大力弘扬载人航天精神,2023年2月24日,中国载人航天工程办公室、中国国家博物馆(以下简称“国博”)共同举办的“逐梦寰宇问苍穹――中国载人航天工程30年成就展”在国博开幕。
基于KnCMPSO算法的异构无人机协同多任务分配
无人机多任务分配 多目标优化 粒子群算法 协同进化
2023/2/20
随着无人机(Unmanned aerial vehicle,UAV)技术的广泛应用和执行任务的日益复杂,无人机多机协同控制面临着新的挑战.以无人机总飞行距离和任务完成时间为优化目标,同时考虑异构无人机类型、任务执行时序等多种实际约束,构建基于多种约束条件的异构无人机协同多任务分配模型.该模型不仅包含混合变量,同时还存在多个复杂的约束条件,因此,传统的多目标优化算法并不能有效地处理混合变量及对问题空...
当前,轨道空间日益拥挤、太空竞争不断加剧,对航天器执行既定任务时的轨道威胁自主应对能力提出了新的挑战,使得航天器智能自主控制技术迎来新的发展机遇.在调研分析了轨道威胁感知、自主决策规划、规避机动动作执行、自主控制系统架构相关研究进展的基础上,总结提出了威胁规避智能自主控制面临的主要瓶颈问题,并分析指出发展“感知−决策−执行”一体化控制是破解瓶颈难题的有效手段,最后从一体化控...
无人机反应式扰动流体路径规划
无人机 反应式路径规划 受约束扰动流体动态系统 深度强化学习 训练环境
2023/2/20
针对复杂三维障碍环境,提出一种基于深度强化学习的无人机(Unmanned aerial vehicles,UAV)反应式扰动流体路径规划架构.该架构以一种受约束扰动流体动态系统算法作为路径规划的基本方法,根据无人机与各障碍的相对状态以及障碍物类型,通过经深度确定性策略梯度算法训练得到的动作网络在线生成对应障碍的反应系数和方向系数,继而可计算相应的总和扰动矩阵并以此修正无人机的飞行路径,实现反应式避...
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:双基成像探测与制导飞行轨迹设计方法
双基 成像探测 制导飞行轨迹 设计方法
2023/2/17
双基协同成像探测与制导技术,综合了双基SAR前视被动成像与集群协同分布式打击的双重优势,是精确制导技术极具有发展潜力的研究方向之一,为了实现双基协同成像探测和精确制导,需要有同时满足成像探测约束和双基集群协同控制约束的飞行轨迹,实现探测系统对目标的最优成像分辨以及控制系统对集群的最优控制。

重庆大学光电工程学院受聘为国家航天动力产业计量测试联盟理事单位(图)
重庆大学 光电工程学院 航天动力产业
2023/2/16
2023年2月11日,由中国航天科技集团有限公司第六研究院主办、航天六院计量所承办的国家航天动力产业计量测试联盟大会在西安召开。全国近40家知名企业、计量检测技术机构、科研院所和高等院校齐聚一堂,携手共建产业联盟、共商产业发展大计。
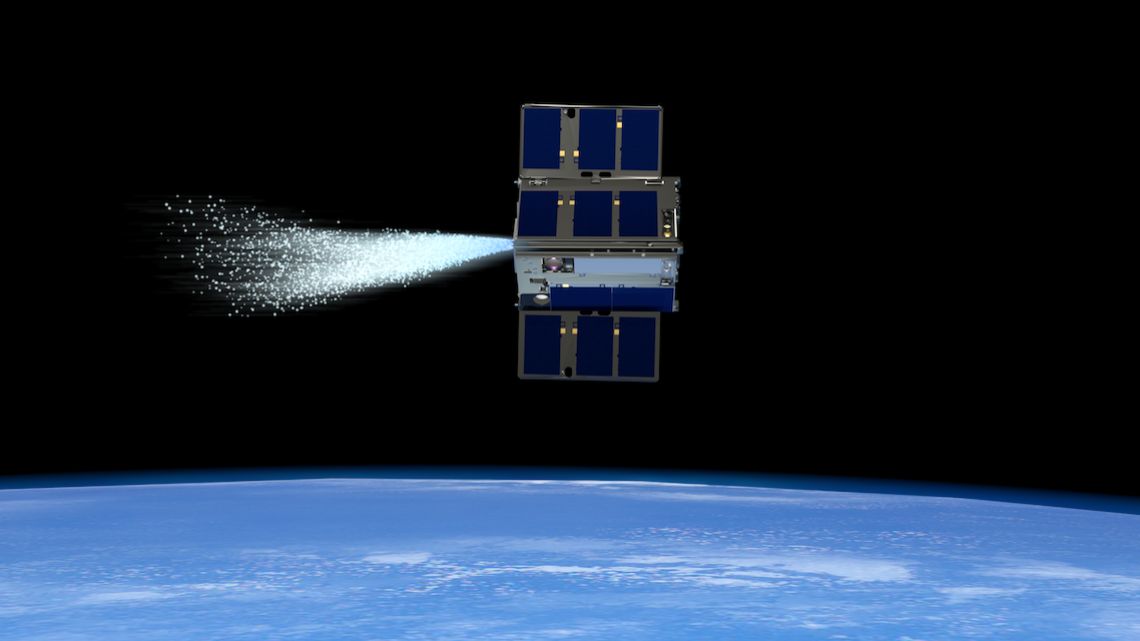
Petro earns Air Force award to research next-gen spacecraft propellants(图)
佩特罗因 下一代 航天器 推进剂
2023/2/15
With the advancement of satellite propulsion systems will come a new age in space exploration, which is why the Air Force Office of Scientific Research has selected Elaine Petro, assistant professor o...
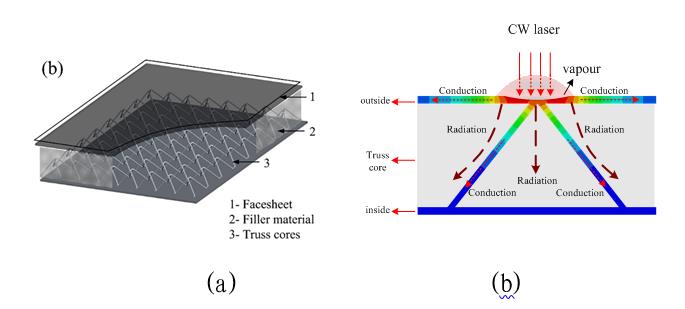
抗激光加固已经成为高速飞行器结构设计必须考虑的重要环节。目前常见的抗激光加固技术主要包括反射涂层、高导热材料、烧蚀材料和拖延传热技术。虽然现有的抗激光加固技术可以在一定程度上延缓激光破坏时间,但是由于工艺复杂、功能单一、结构效率低、力学性能差,在实际应用中仍存在一定的局限性。

国内外航天工程实践发现,1000km以上接近2000km的高高度低地球轨道(HLEO)等近地空间区域以地球辐射带质子环境为主。质子具有电离和非电离两种方式,可通过位移损伤效应(DDD,Displacement Damage Dose)和总剂量效应(TID,Total Ionizing Dose)作用导致航天器在轨异常和故障,并主要表现为星用电子器件/部件性能衰退导致电路失效。含双极工艺器件与电路在...
国外在低地球轨道进行充气式减速器试验
低地球轨道 充气式 减速器
2023/1/28
近期,美国国家航空航天局(NASA)在低地球轨道成功进行了充气式减速器试验(LOFTID),充气式减速器再入大气层后在太平洋溅落。