
搜索结果: 1-15 共查到“知识要闻 控制科学与技术 中国科学院”相关记录410条 . 查询时间(1.642 秒)

近日,中国科学院上海微系统与信息技术研究所仿生视觉系统实验室李嘉茂研究员团队与路特斯机器人(LOTUS ROBOTICS)合作在智能驾驶感知领域取得了重要进展。
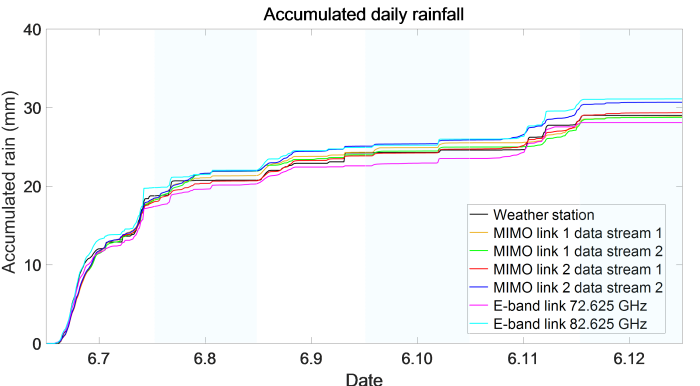
中国科学院大气物理研究所利用新型微波链路技术监测城市降雨(图)
通信一体化 技术监测
2023/12/5
无线通信网络技术,尤其是蜂窝网络通信技术,其应用已远不止于提供基本的民用通信连接。随着感知通信一体化 (Integrated Sensing and Communication, ISAC) 技术的发展,通过共享频谱、信号、硬件等,可实现通信与感知的相辅相成。2023年来,一种创新的城市降水监测技术是通过分析商用微波回程链路 (Commercial microwave links - CML) 和...
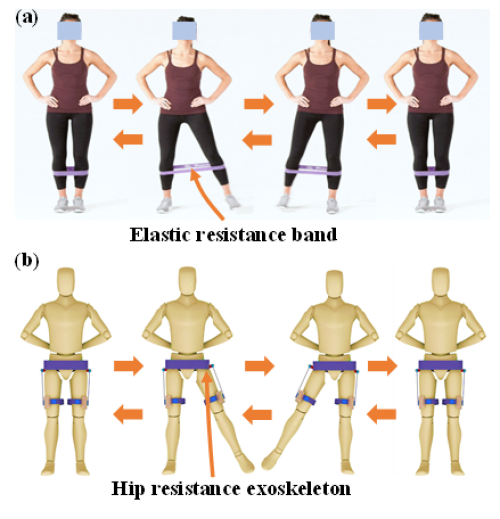
中国科学院深圳先进技术研究院等研发出首款抗阻横向行走锻炼外骨骼(图)
抗阻 横向行走 锻炼 外骨骼
2023/10/8
近日,中国科学院深圳先进技术研究院集成所智能仿生中心副研究员曹武警与香港中文大学、上海交通大学、东北大学合作,在外骨骼机器人领域取得新进展。该团队研发了国际首款面向横向行走步态的外骨骼,通过在横向行走时施加主动阻力力矩代替弹力带被动力矩,实现髋关节外展肌肉的精准高效锻炼,为抗阻横向行走锻炼提供了智能化新方法。相关研究成果以Development and Evaluation of a Hip Ex...

中国科学院近代物理研究所高功率固态功率源及其标准化通过现场测试(图)
固态功率源 加速器驱动 装置
2023/9/13
加速器驱动嬗变研究装置(简称“CiADS”)是中国科学院近代物理研究所承担建设的国家重大科技基础设施,将建成全球首个兆瓦级加速器驱动次临界系统(ADS)研究装置。大型加速器的工业化应用是CiADS的重要研究方向之一,能够推动 ADS 相关工业技术全产业链的发展。

中国科学院深圳先进技术研究院等发展出面向血管介入手术的磁控导丝机器人(图)
血管介入手术 磁控 导丝机器人
2023/9/11
近日,中国科学院深圳先进技术研究院集成所智能仿生中心团队和深圳大学附属华南医院神经外科团队合作,在磁驱动连续体微型机器人领域取得新进展。该团队提出了具有磁驱动主动转向和自主推进能力的磁性介入导丝机器人系统。通过该系统介入,医生能远程操控磁性导丝在复杂的血管分叉处快速选择正确路径并到达目标部位,有效减少医生的辐射暴露。该团队提出了磁性导丝的建模方法与轨迹规划方法,为磁性导丝的自动控制奠定了基础。

中国科学院深圳先进技术研究院机器人平台加速银纳米晶的高通量研究(图)
机器人 银纳米晶 光学仿真
2023/6/6
2023年6月6日,中国科学院深圳先进技术研究院材料所喻学锋、赵海涛团队在国际学术期刊《化学工程杂志》Chemical Engineering Journal 上发表题为“Robotic platform for accelerating the high-throughput study of silver nanocrystals in sensitive/selective Hg2+ det...
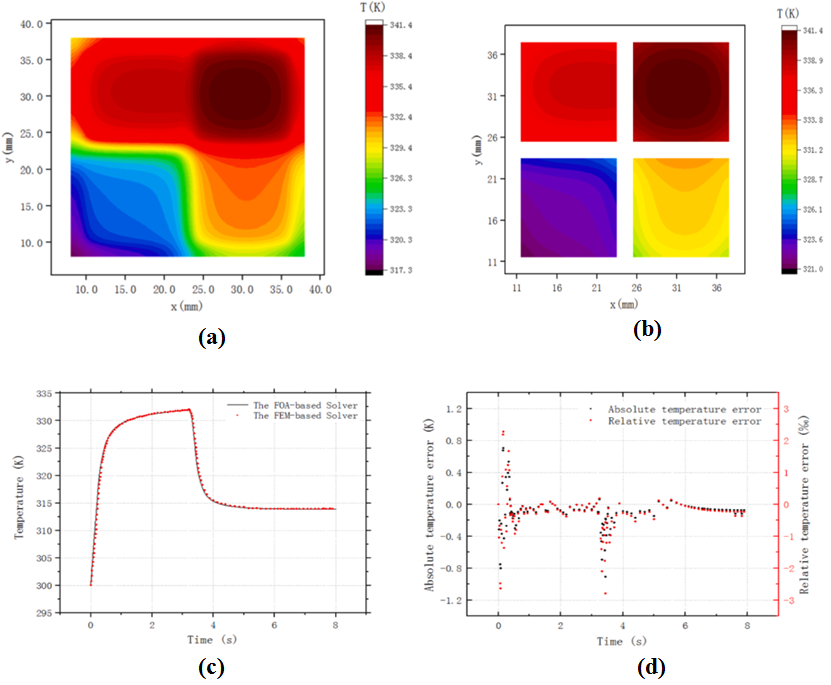
中国科学院微电子所在Chiplet热仿真模型及工具研究方面取得进展(图)
仿真模型 器件集成 系统芯片
2023/5/31
后摩尔时代,依靠缩小尺寸提升器件集成度的硅基CMOS技术面临物理原理和工艺技术的巨大挑战,具有高性能、低功耗和低成本优势的Chiplet技术成为延续摩尔定律的重要选择之一。该技术利用先进封装工艺,将多个异构芯片集成为特定功能的系统芯片,从而满足人工智能等领域的应用需求。但由于Chiplet异构集成密度大幅增加,热耗散问题对异构系统的可靠性造成严峻挑战。如何针对Chiplet异构集成系统的复杂性,提...
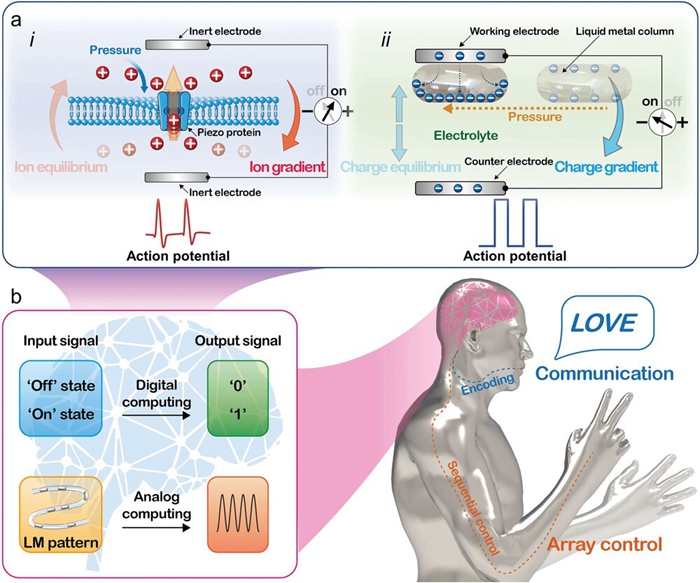
中国科学院理化技术研究所在仿生液态金属机电一体化器件研究方面取得进展(图)
仿生 液态金属 机电一体化
2023/5/26
感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制,在此基础上,还可以演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面...

中国科学院理化所在仿生液态金属机电一体化器件研究方面取得进展(图)
仿生液态 金属 机电一体化
2023/5/26
感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制,在此基础上,还可以演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面...

感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制。在此基础上,演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面向人工...
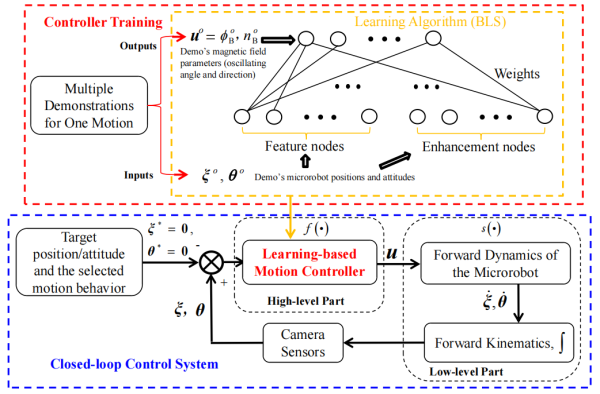
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
2023/5/18
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...

中国科学院自动化研究所主题教育读书班赴怀柔开展调研学习活动(图)
主题教育 调研学习 北京怀柔
2023/5/17
为进一步深化学习贯彻习近平新时代中国特色社会主义思想主题教育效果,2023年5月15日,中国科学院自动化研究所党政领导班子成员、纪委委员、支部书记、机关中层干部44人赴中科院与“两弹一星”纪念馆和怀柔“脑认知功能图谱与类脑智能交叉研究平台”开展调研学习活动,不断推动理论学习往深里走、往实里走、往心里走。

智能矿山无人化是中国无人驾驶技术应用的重要场景之一,对实现矿山减人增安提效、促进能源绿色低碳转型有着重要意义。近日,中国科学院自动化研究所、国际先进技术应用推进中心、中国矿业大学(北京)内蒙古研究院、中科慧拓联合孵化的矿山智能运载机器人“载山CarMo”在内蒙古鄂尔多斯正式发布。据现有公开报道,这是我国首台套具备产业化标准要求的、具备完全自主知识产权的新能源运载装备。

中国致公党中央委员会调研组来中国科学院自动化研究所调研(图)
调研 中国致公党中央委员会 中国科学院
2023/4/3
2023年3月29日下午,致公党中央组织部部长赵晓萍率队来中国科学院自动化研究所调研致公党代表人士队伍建设情况。院直属机关党委副书记刘京红,院直属机关党委组织统战部部长许冬,自动化所党委书记牟克雄出席活动。致公党北京市委常委、海淀区委副主委、致公党中科院基层委员会主委王亮主持活动。