
搜索结果: 1-14 共查到“控制科学与技术 外骨骼”相关记录14条 . 查询时间(0.162 秒)
中国科学院深圳先进技术研究院专利:外骨骼机器人的腰部支撑部件及外骨骼机器人
中国科学院深圳先进技术研究院专利:便携式可穿戴下肢康复及助行外骨骼机器人
中国科学院深圳先进技术研究院等研发出首款抗阻横向行走锻炼外骨骼(图)
抗阻 横向行走 锻炼 外骨骼
2023/10/8
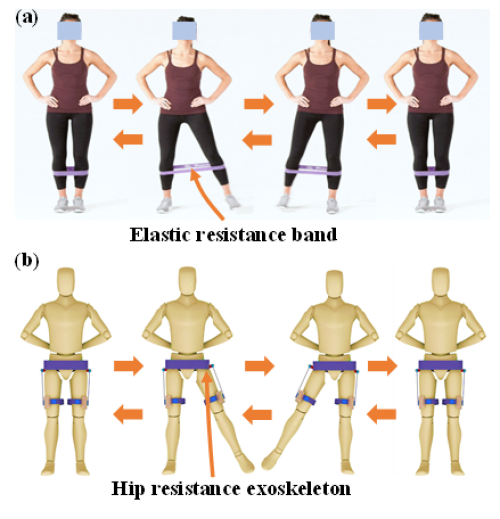
近日,中国科学院深圳先进技术研究院集成所智能仿生中心副研究员曹武警与香港中文大学、上海交通大学、东北大学合作,在外骨骼机器人领域取得新进展。该团队研发了国际首款面向横向行走步态的外骨骼,通过在横向行走时施加主动阻力力矩代替弹力带被动力矩,实现髋关节外展肌肉的精准高效锻炼,为抗阻横向行走锻炼提供了智能化新方法。相关研究成果以Development and Evaluation of a Hip Ex...
中国科学院深圳先进技术研究院专利:负重外骨骼机器人脱离装置及脱离方法
中国科学院深圳先进技术研究院 专利 负重 外骨骼机器人 脱离
2023/9/12
中国科学院深圳先进技术研究院专利:负重外骨骼机器人脱离装置及脱离方法

中国仪器仪表网|负重及搬移托举助力外骨骼机器人关键技术项目启动(图)
智能机器人 外骨骼机器人关键技术 产业化
2018/6/26
日前,“负重及搬移托举助力外骨骼机器人关键技术研究及典型应用验证”项目启动会暨实施方案论证会在北京顺利召开。科技部、工业和信息化部、北京航空航天大学等共计40余人参加了会议。随着智能机器人的进一步发展,我国也在不断加强智能机器人的研发。2018年1月份,国家根据科技部据相关文件要求,发布了国家重点研发计划“智能机器人”重大专项项目。

2018年6月21日,由我校机器人研究中心执行主任程洪教授作为负责人的智能机器人专项“截瘫助行外骨骼系统关键技术研究及示范应用”项目在沪召开启动会暨实施方案评审会。来自科技部、上海科委、哈工大、上海交大、北航、清华、华中科大、中科院自动化所、中科院深圳先进院、成都顾连医院、八一康复中心及川大华西医院等全国各高校、科研院所的领导、专家和项目组成员与会。会议就项目实施方案,项目组织协调等问题进行了深入...
北京理工大学“外骨骼机器人”国家重点研发计划项目启动
北京理工大学 外骨骼机器人 国家重点研发计划 项目启动
2018/6/15
日前,2017年度国家重点研发计划“智能机器人”重点专项的“负重及搬移托举助力外骨骼机器人关键技术研究及典型应用验证”项目启动会暨实施方案论证会在北京华融大厦顺利召开。科技部高技术研究发展中心刘振中、工业和信息化部科技司陈江耀、北京航空航天大学陈殿生教授等7名项目责任专家应邀出席会议并进行指导。北理工科研院高新技术部副部长张博、机电学院党委书记王伟、5家项目参与单位相关负责人及项目组成员等共计约4...
针对辅助外骨骼,分析了单自由度人机交互中的人机偏差因素,建立人机偏差变量模型,运用自对齐机构设计理论设计外骨骼机构,以提升人机耦合性能.首先,深入分析了单自由度人体生物关节,建立了人体简化模型+人机偏差变量模型的外骨骼设计模型参考.然后,运用自对齐机构设计理论和多自由度关节解耦方法,提出了自对齐人体运动的外骨骼机构设计思路与方法.最后,以下肢髋关节为对象,将髋关节外骨骼解耦为3个单自由度关节,设计...
针对由于关节驱动特性不明而造成助力外骨骼蹲起不顺畅的问题,为增强人机交互性及助力外骨骼蹲起可靠性,对蹲起时助力外骨骼的关节驱动及人机耦合作用下的关节驱动补偿进行了研究.通过人体数据采集实验及非线性数据拟合,得到各关节运动学方程.建立了蹲起时的人机耦合动力学模型,研究了关节驱动特征,发现膝关节的驱动特征及其波动性远大于踝关节和髋关节;膝关节驱动力矩与角加速度耦合性强;只在蹲起前半段,系统重心迁移对膝...
外骨骼机器人的非结构地面行走步态分类算法
外骨骼 支持向量机 粒子群优化算法 步态分类
2017/7/20
针对人体运动随机性和非结构地面等因素造成在不同类型地面上足底力(GRF)差异大的情况,研发了一套配有鞋底压力传感器、用于实时检测足底力变化的实验靴,提出了基于PSO-SVM(基于粒子群优化算法的支持向量机)的步态分类方法.根据足底受力云图,该实验靴中冗余布置了7枚压力传感器.对人行走在步行机(5 km/h)、水平硬路面和野外草地上的足底力进行了采集和处理.将基本组的足底力作为训练集,预设对应的标签...
基于多模式弹性驱动器的膝关节外骨骼机械腿
弹性驱动器 多模式运动 膝关节外骨骼 运动状态机
2017/7/20
基于人体行走过程中下肢肌肉的运动机理,提出一种多模式弹性驱动器,并应用于膝关节外骨骼中实现膝关节外骨骼机械腿的刚性驱动及柔性驱动.首先,对多模式弹性驱动器及膝关节外骨骼进行机构设计,并分析驱动器运动模式.其后,进行驱动器的动力学建模,并分析弹性参数、阻尼参数及负载对驱动器输出带宽的影响,针对弹性驱动器特征进行了基于运动状态机的控制策略研究.最后,根据控制策略对膝关节外骨骼样机实施运动控制.实验结果...
为了辅助偏瘫患者进行上肢运动功能康复训练,研制了一种具有重力平衡特性的上肢康复外骨骼机器人系统.首先介绍了外骨骼的机械结构设计以及基于Matlab/RTW环境的半物理实时控制平台.然后基于辅助平衡法建立了系统重力平衡模型,通过添加零初始长度弹簧以及辅助连杆来平衡外骨骼和人体手臂在康复训练过程中受到的重力.最后通过仿真和实验,比较不同平衡条件下所需要施加的关节驱动力矩和肱二头肌的表面肌电信号强度.在...
外骨骼助力机器人研究现状与关键技术分析
外骨骼 助力机器人 关键技术
2016/6/15
根据研究工作积累和查阅相关文献资料,对外骨骼助力机器人国内外的研究现状进行了总结,对外骨骼助力机器人所涉及的机械结构技术、驱动技术、传感控制技术、能源技术以及安全性技术等关键技术进行了分析,并对外骨骼助力机器人在军事领域、医疗领域和工业领域的应用前景进行了展望。