
搜索结果: 1-15 共查到“控制科学与技术 行走”相关记录30条 . 查询时间(0.099 秒)
中国科学院深圳先进技术研究院等研发出首款抗阻横向行走锻炼外骨骼(图)
抗阻 横向行走 锻炼 外骨骼
2023/10/8
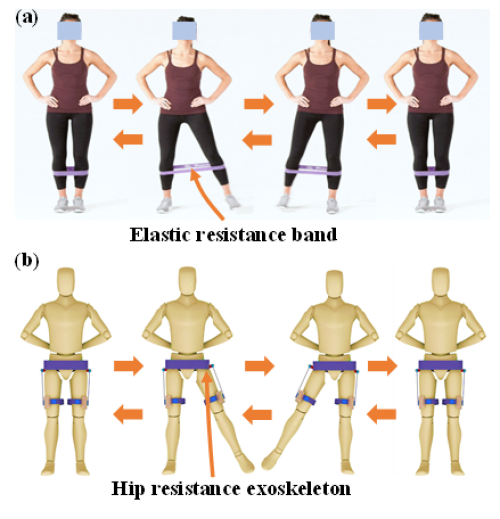
近日,中国科学院深圳先进技术研究院集成所智能仿生中心副研究员曹武警与香港中文大学、上海交通大学、东北大学合作,在外骨骼机器人领域取得新进展。该团队研发了国际首款面向横向行走步态的外骨骼,通过在横向行走时施加主动阻力力矩代替弹力带被动力矩,实现髋关节外展肌肉的精准高效锻炼,为抗阻横向行走锻炼提供了智能化新方法。相关研究成果以Development and Evaluation of a Hip Ex...
中国科学院合肥物质科学研究院专利:一种双足机器人行走机构
神经机器人系统解码帕金森病行走障碍
神经机器人 帕金森病 行走障碍
2022/9/1
利用新的神经机器人平台和电极测量,瑞士洛桑联邦理工学院研究人员解码了帕金森病是如何导致患者大脑失调,损害其行走等运动能力的。这一发现揭示了大脑中丘脑下核区域如何协调腿部肌肉的激活,并提出了可检测患者“冻结”和其他行走障碍的算法。
基于自学习中枢模式发生器的仿人机器人适应性行走控制
仿人机器人 自学习中枢模式发生器 适应性行走 轨迹生成
2021/10/13
为了克服传统中枢模式发生器(Central pattern generator,CPG)关节空间控制方法的复杂性和局限性,本文基于自学习中枢模式发生器模型,提出了一套在线调制和融合多传感器信息的仿人机器人环境自适应行走控制方法.算法难点在于如何在机器人的工作空间将自学习CPG用于工作空间轨迹生成,并使CPG参数直接和步态模式相关联.本文提出了利用自学习CPG来学习和实时生成机器人质心轨迹和脚掌轨迹...
欧洲科学家团队报告研发一种磁驱动的新型高速软体机器人。这种机器人可以超快速地完成行走、游泳、漂浮和捕捉活体苍蝇,将在生物组织工程与生物力学领域得到广泛应用。对于自然界的生物而言,高速行动对捕猎、逃跑和飞行至关重要。这一点对于软体机器人也一样有用,因为它使机器人可以捕捉快速移动的物体,并对周围动态环境迅速做出反应。
外骨骼机器人的非结构地面行走步态分类算法
外骨骼 支持向量机 粒子群优化算法 步态分类
2017/7/20
针对人体运动随机性和非结构地面等因素造成在不同类型地面上足底力(GRF)差异大的情况,研发了一套配有鞋底压力传感器、用于实时检测足底力变化的实验靴,提出了基于PSO-SVM(基于粒子群优化算法的支持向量机)的步态分类方法.根据足底受力云图,该实验靴中冗余布置了7枚压力传感器.对人行走在步行机(5 km/h)、水平硬路面和野外草地上的足底力进行了采集和处理.将基本组的足底力作为训练集,预设对应的标签...
中国科学院上海应用物理研究所等构建高效DNA行走机器人
中国科学院上海应用物理研究所 高效DNA 行走机器人
2017/3/10
中科院上海应用物理研究所与华东师范大学合作,在DNA分子机器方面取得新进展,构建了一种核酸外切酶驱动的高效DNA行走机器人。相关成果近日发表于德国《应用化学》。细胞内许多功能的实现和宏观世界中的机器运转一样巧妙,而在试管中模拟细胞内的动态有序结构,构筑人工分子机器也引起了研究者的广泛兴趣。DNA分子具有强大的序列可编程性及精确的分子识别能力,被认为是设计分子机器的重要元件。设计并构建高效率的DNA...
日本开发出两足式高速行走机器人
日本 两足式高速行走机器人 机器人技术
2014/10/23
据《日刊工业新闻》近期报道,日本东京大学研究人员开发出时速可达4.2公里的两足式高速行走机器人。研究小组采用高速相机和高效驱动器相配合,一秒达600帧的高速相机瞬间检测机器人腰部和腿部动作,通过高速驱动器驱动脚部动作,保持奔跑中的动平衡。开发的机器人腿长14厘米,重量800克。如换算成腿长70厘米的人类,4.2公里/小时的高速行走速度相当于人类20公里/小时的行进速度。该机器人还可以实现翻筋斗等空...
研究半被动双足机器人行走过程固定点的全局稳定性问题。使用罗盘机器人模型,在脚与地面冲击前,采用沿着支撑腿方向的脉冲推力作为行走的动力源,采用庞加莱映射方法分析了半被动双足机器人行走的固定点及其稳定性。通过引入一个限位器使两腿间的夹角在脚与地面冲击时保持为常数。证明了半被动双足机器人行走过程固定点的存在性及其全局稳定性,并讨论了固定点存在的动力学附加条件。仿真结果表明:该文提出的采用脉冲推力作为行走...

由中国自主研发的风能机器人“极地漫游者”2月8日在南极中山站附近冰盖上“走”出了第一步,这是我国研发的首台基于再生风能驱动的机器人。
中国力学学会行走机械电液控制技术专题研讨会
中国力学学会 行走机械电液控制技术 专题研讨会
2010/7/1
会议背景介绍: “中国力学学会行走机械电液控制技术专题研讨会”将于2010年7月在秦皇岛市召开,本次会议由中国力学学会主办,燕大产业集团承办。会议议题: 1. 流体动力技术的发展动态及趋势;2. 行走机械电液控制技术; 3. 流体动力系统的节能及控制; 4. 流场计算与可视化技术。

美研制出双腿直立行走机器人 受冲撞仍直立(图)
直立行走 机器人
2009/10/27
据美国媒体报道,曾研制出大狗机器人的波士顿动力公司近日又有新发明,他们研制出一种像真人一样四处活动的机器人。该公司正在制造Petman的原型,来检验防护服的性能。

干电池驱动小型机器人行走24公里破纪录(图)
干电池 小型机器人
2009/8/12
松下EVOLTA电池驱动的三轮机器人于2009年8月6日在法国勒芒赛中第二次打破吉尼斯世界纪录。该电池在2008年1月首次打破世界纪录并被誉为“最持久耐用的AA碱性电池”。