
搜索结果: 1-5 共查到“控制科学与技术 磁驱动”相关记录5条 . 查询时间(0.273 秒)
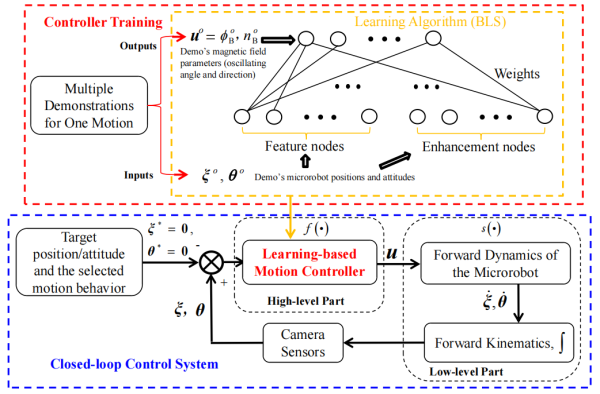
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
2023/5/18
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...

中国科学院深圳先进技术研究院多个磁驱动软体微型机器人的独立控制(图)
磁驱动 微型机器人 智能仿生
2022/3/29
2022年3月29日,中国科学院深圳先进技术研究院集成所智能仿生中心团队在微型机器人领域取得新进展。针对相同磁场下多个磁驱动软体微型机器人接收相同磁场而难以独立控制的问题,团队提出了一种完全解耦的多磁驱动软体微型机器人独立控制策略,首次实现了4个磁性软体微型机器人的独立位置控制和3个磁性软体微型机器人的独立路径跟随控制。
欧洲科学家团队报告研发一种磁驱动的新型高速软体机器人。这种机器人可以超快速地完成行走、游泳、漂浮和捕捉活体苍蝇,将在生物组织工程与生物力学领域得到广泛应用。对于自然界的生物而言,高速行动对捕猎、逃跑和飞行至关重要。这一点对于软体机器人也一样有用,因为它使机器人可以捕捉快速移动的物体,并对周围动态环境迅速做出反应。