
搜索结果: 1-15 共查到“光电子技术 机器”相关记录15条 . 查询时间(0.2 秒)

二次无机气溶胶是大气细颗粒物(PM2.5)的重要组分,其快速生成与积累往往是冬季重污染天气出现的关键因素。传统的空气质量数值模式由于输入数据的不确定性和模式内部物理化学机制模拟方案的不完善,导致二次无机气溶胶模拟仍然具有较大的不确定性。
中国科学院大气物理研究所可解释集成机器学习揭示气象和排放源对杭州臭氧形成的影响(图)
集成 机器 气象 臭氧形成
2024/3/25
位于中国东部的特大城市杭州近年来O3污染严重,明确O3污染形成的关键驱动因素对抑制O3恶化至关重要。化学传输模型和传统统计方法在量化气象和排放源对O3形成的影响上各自存在局限性。基于数据驱动方法,开发一种能够快速、准确、全面评估各个驱动因素对O3形成影响的新方法具有重要意义,对解析杭州或其他城市O3污染成因具有重要参考价值。

2022年2月28日下午,“华中大-新国大学术大讲堂”系列讲座在华中科技大学光学与电子信息学院顺利举行。应华中科技大学光学与电子信息学院低功耗与智能集成电路研究室王超教授邀请,新加坡国立大学电气与计算机工程系Jerald Yoo副教授为华中科技大学光学与电子信息学院师生作了题为“用于可穿戴健康监测的边缘机器学习癫痫检测”的专题报告。讲座由王超教授主持,60多名师生及科研工作者线上参会聆听。Jera...

华东理工大学光驱动分子机器研究获新进展(图)
德国应用化学 马达化冠醚大环 光驱动分子机器
2021/5/19
构建光响应型主-客体系统是开发合成仿生智能体系的关键,目前采用的通用策略是将光异构化单元引入大环主体或客体的结构中,从而通过构象变化有效改变非共价结合亲和力。然而,设计可多稳态切换的光控主-客体系统,且同时又能实现和控制对不同手性客体的立体可切换的选择性识别,仍然是一个重大挑战。近日,华东理工大学化学与分子工程学院、费林加诺贝尔奖科学家联合研究中心曲大辉教授课题组巧妙地将一代分子马达与冠醚环结合,...

中国科学院上海光学精密机械研究所提出了对二维材料光谱学进行机器学习研究的新方案(图)
二维材料 光谱学 机器学习
2020/11/23
近期,中国科学院上海光学精密机械研究所微纳光电子功能材料实验室在利用随机森林算法实现二维材料层数和缺陷识别方面取得新进展,揭示了机器学习算法在二维材料光谱学研究领域的应用潜力,相关工作发表在[ Nanomaterials 2020, 10, 2223 ]。
近日,我校王宏志教授课题组在智能变色―致动一体化软体机器人领域取得新进展,相关研究成果以《晶格收缩触发的协同电致变色致动器》(“Lattice-Contraction Triggered Synchronous Electrochromic Actuator”, DOI:10.1038/s41467-018-07241-7)为题发表于国际知名学术期刊《自然》(Nature)子刊《自然•...
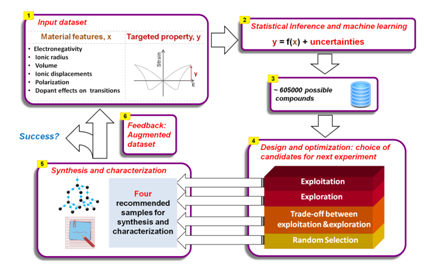
西安交通大学科研人员利用机器学习技术开发新型压电材料(图)
西安交通大学 机器学习技术 压电材料
2018/1/13
传统的材料开发方式往往依赖于试错法或者经验。但是随着材料成分、微观结构等复杂性的增加,传统的方法不再适用。如何利用尽可能少的实验来有效的提升新材料的性能,是材料研究人员所面临的巨大挑战。机器学习技术被认为可以从大量材料科学的数据中通过算法搜索隐藏于其中的重要信息,甚至是物理规律,进而实现材料性能的快速优化。西安交大材料学院科研人员提出了一个基于主动学习技术的材料设计方法,并应用于加速设计开发新型压...
Micro-nano robotics is one of the key research directions of nanotechnology. Prof. Toshio Fukuda created the IEEE Nanotechnology Council and IEEE International Conference on Nanotechnology in 2000. Du...
2017SPIE自动视觉检查和机器视觉会议(2017 Conference on Automated Visual Inspection and Machine Vision)
2017 SPIE 自动视觉检查和机器视觉 会议
2017/4/25
2017SPIE自动视觉检查和机器视觉会议(2017 Conference on Automated Visual Inspection and Machine Vision)。
针对运动副间隙引起的并联机器人定位误差,提出了通过优化驱动杆的关节角位移参数来补偿运动副间隙误差的方法。以平面3-RRR并联机器人系统为研究对象,建立运动副误差模型,研究了间隙误差引起的杆件实际长度误差和驱动杆实际关节角位移误差的变化规律。根据机器人的逆运动学方程,建立了基于全微分理论的机构误差分析模型。应用粒子群优化(PSO)算法优化驱动杆的关节角位移参数,补偿了运动副间隙引起的系统结构误差。引...
路径预设的移动机器人设计
移动机器人 路径预设 传感器 路线记录
2013/6/20
为实现具有环境自适应能力的全方位移动的机器人,分析了当前移动机器人运动路径规划中存在的问题,提出一种路径预设移动机器人的设计方案。该系统由移动机器人和无线遥控器两个部分组成,采用霍尔传感器、红外避障传感器和电子指南针等多种传感器的融合,实现移动机器人的精确移动、路径学习和信息存储。从记录模式和移动模式两个方面阐述了系统工作流程。调试结果表明,设计提出的移动机器人能搭载各种设备,完成按预设路径移动并...
光电功能分子材料与分子机器
分子机器 光电功能分子材料 非线性光学
2008/10/9
本课题提出了利用不同波长的荧光来判断分子马达运动的思路,创新合成了带“锁”的荧光分子“梭”和双荧光识别光控分子“梭”。在基于双光子吸收和反饱和吸收原理的新型有机非线性光学与光子材料、激光光限幅功能材料、有机/高分子光电导材料、有机发光材料、有机光伏电池材料等国际前沿领域开展了大量而卓有成效的工作,创新设计和合成了一系列具有优良非线性光学响应性能、高光电转化效率和稳定性的有机功能材料。创新合成了一系...
该项目研制的RJ07A激光加工机器人属五自由度直角坐标型通用工业机器人,最大工作负荷7千克,重复定位精度±0.05。可用于激光焊接、切割、打孔、表面硬化和熔覆等场合。该机器人采用交流伺服驱动技术以及高精度、高刚性的一体化密封导轨和高精度行星减速机,具有良好的低速稳定性、高速动态响应和高精度的轨迹控制,并可实现免维护功能。RJ07A激光加工机器人采用SIASUN-GRC-CAN高性能机器人控制器,其...
激光陀螺自动调腔机器
调腔 激光陀螺 自动调腔 激光器
2008/9/19
该研究应用纳米级驱动装置的微动机器人末端执行器应精准灵活的抓取带齿冠球面镜与腔体的28.28光胶面进行调腔、光胶操作,采用闭环控制,使执行机构在调腔中实现平稳高效自动搜索TEMoo模与腔体可靠地无间隙光胶。同时,应用图像识别技术,在调腔中对激光的模式进行判别、归类、分析。对杂波抑制程序进行判读,引导调腔搜索定位。
移动机器人激光全局定位系统
移动机器人 激光全局定位系统 激光扫描方式
2008/9/3
该项目为一种利用激光扫描方式的全局位置传感器系统。该系统由被动式CCR(构成合作路标)和传感装置与数据处理系统构成。传感装置由激光器、扫描旋转装置、光电信号采集和具有数据采集、通讯功能的单片机系统构成。数据处理系统由具有数据处理、计算功能的计算机系统实现。该系统可实现全方位(360°圆周范围)路标自动获取,快速计算传感装置相对路标参考坐标系的绝对位置和方位功能。它可安装在移动机器人顶部,协助机器人...