
搜索结果: 46-60 共查到“知识要闻 控制科学与技术”相关记录1857条 . 查询时间(0.348 秒)

中国科学院理化所在仿生液态金属机电一体化器件研究方面取得进展(图)
仿生液态 金属 机电一体化
2023/5/26
感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制,在此基础上,还可以演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面...

全国科技活动周丨第五届中国机器人技能大赛暨机器人创新与实践论坛在宁举行(图)
科技活动周 机器人 技能大赛
2023/5/25
2023年5月19日至21日,在第七个全国科技工作者日来临之际,第五届中国机器人技能大赛暨机器人创新与实践论坛在南京工业大学落下帷幕。天津大学、中国人民解放军陆军工程大学、南京工业大学等10所院校14支参赛队伍喜获冠军。

感知机械刺激并将其转化为生物电信号以完成信息感知、传递和计算,是自然界动物生存和进化的基本生理机制。在此基础上,演化出各种各样的用以应对复杂多变环境的智能行为,如信息处理、学习、判断、反馈等。在哺乳动物体内,机械刺激感知的离子通道蛋白在不同组织器官的机械感觉和转导中发挥着重要作用。通过离子通道、细胞膜受体和细胞内信号通路,将机械刺激转化为生物信号,并被细胞识别感知。模拟上述的生物智能行为是面向人工...
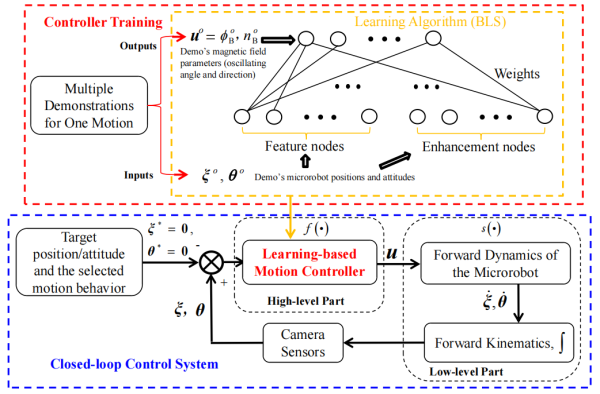
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
2023/5/18
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...

中国科学院自动化研究所主题教育读书班赴怀柔开展调研学习活动(图)
主题教育 调研学习 北京怀柔
2023/5/17
为进一步深化学习贯彻习近平新时代中国特色社会主义思想主题教育效果,2023年5月15日,中国科学院自动化研究所党政领导班子成员、纪委委员、支部书记、机关中层干部44人赴中科院与“两弹一星”纪念馆和怀柔“脑认知功能图谱与类脑智能交叉研究平台”开展调研学习活动,不断推动理论学习往深里走、往实里走、往心里走。
关于合作申报“2023年度河北省科学技术奖”项目的公示
2023年 河北省科学技术奖 合作申报
2023/5/17
根据《2023年度河北省科学技术奖提名工作的通知》要求,从2023年5月17日起,对哈尔滨工业大学机电工程学院参与提名项目“足式机器人腿部底层液压控制关键技术及应用”予以公示(公示信息详见附件)。自公示之日起7日内,任何单位和个人对申报项目持有异议的,应当以真实身份书面向哈尔滨工业大学机电工程学院提出。哈尔滨工业大学机电工程学院将按规定对异议人(单位)身份予以保护。凡匿名异议将不予受理。

中科院深圳先进院提出磁控仿鱼微型机器人复杂运动(图)
磁控仿鱼 微型机器人 非线性
2023/5/10
2023年5月10日,来自中国科学院深圳先进技术研究院集成所智能仿生研究中心的徐升和徐天添研究团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,并且本方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。

智能矿山无人化是中国无人驾驶技术应用的重要场景之一,对实现矿山减人增安提效、促进能源绿色低碳转型有着重要意义。近日,中国科学院自动化研究所、国际先进技术应用推进中心、中国矿业大学(北京)内蒙古研究院、中科慧拓联合孵化的矿山智能运载机器人“载山CarMo”在内蒙古鄂尔多斯正式发布。据现有公开报道,这是我国首台套具备产业化标准要求的、具备完全自主知识产权的新能源运载装备。
论文题目:数据驱动优化的刚软混杂机器人视觉伺服控制研究。答辩人:何邵颖。时间:2023年05月17日9:00。关键词:刚软混杂机器人,数据驱动优化,视觉伺服,输入映射补偿,模型预测控制。
自动焊机器人工作站首次落地田湾核电
自动焊机器人 工作站 田湾核电
2023/5/6
近日,中国核工业二三建设有限公司连云港项目部与中核设计焊接研究所共同研制的全系列风管预制自动焊机器人工作站首次在田湾核电7、8号机组成功落地应用。
上海交通大学自动化系博士生答辩信息:徐文聪
局部放电 定位方法 强度信息 定向天线
2023/5/5
论文题目:局部放电定向阵列传感定位算法研究。答辩人:徐文聪。时间:2023年05月15日10:00。关键词:局部放电,定位方法,强度信息,定向天线,MUSIC算法,数据驱动,强度比例。
上海交通大学自动化系博士生答辩信息:徐梓京
喷水推进 矢量控制 推力分配优化 容错控制
2023/4/26
论文题目:双泵喷水推进船舶矢量控制关键技术研究。答辩人:徐梓京。时间:2023年04月27日10:00。关键词:喷水推进,矢量控制,推力分配优化,容错控制,控制平台,横移试验。

近日,由华为公司主办的2023第九届华为软件精英挑战赛――“普朗克计划”全球总决赛及颁奖典礼于2023年4月22日-23日在广东东莞、深圳举行。总决赛共有9支队伍获得奖项,杭州电子科技大学计算机学院代表队在激烈角逐中斩获一个季军和“最优美代码奖”。