
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ��֤����ؼ�¼26�� . ��ѯʱ��(0.167 ��)
�й���ѧԺ�����������о���ר����һ��ȼ���ֻ�����ϵͳ��������������װ�ü���֤����
�й���ѧԺ�����������о��� ר�� ȼ���ֻ� ����ϵͳ ������ ��������װ��
2023/5/10
�й���ѧԺ�����������о���ר����һ��ȼ���ֻ�����ϵͳ��������������װ�ü���֤����

��������ѡ������ʩ�ߴĵ�R&S CMP200����ͨ�Ų����ǣ�������������������֤��������UWB��Ӧ�á�����Ŀ�Dz���������ʩ�ߴ�������ͨ�������ں�����Ŀ��һ������������ĸ��Ƿ�Χ�����͵��ܺĺ����õİ�ȫ��ʹ�ó�������UWB���п���Ϊ�����������ܱ��豸��ҵ4.0Ӧ���ṩ��������������Ϊ�������ֻ�����ļ���������������UWB���ӷ��㲢֧�ָ���ȫ��Ӧ�ã������䱸��Կ����ϵͳ�ij�������ʹ����...
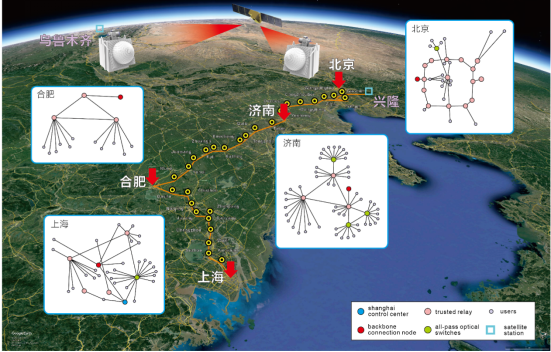
����ʱ��2021��1��7���賿���й���ѧ������ѧ�˽�ΰ����ͬ�³��������־�����й���ѧԺ�Ϻ����������о����������о��顢�������Ӽ����о�Ժ���й����ߵ�����������˾�������ڹ���ѧ���ڿ�Nature��־�Ϸ�������Ϊ����Խ4600��������һ�廯����ͨ�����硱��An integrated space-to-ground quantum communication network over 4,600...

������Ȼ��ѧ�����ش���Ŀ��������������������ȫЭͬ���Ƽ�Ӧ����֤����Ŀ�������ֻ��ڳ����ٿ���ͼ��
������Ȼ��ѧ�����ش���Ŀ ������ ���� ������ȫЭͬ���� Ӧ����֤ ��Ŀ�������ֻ� ����
2018/8/23
2018��8��17�գ��ɼ��ִ�ѧ������������ƹ����ص�ʵ�������γº������Ϊ��Ŀ�����˳е��Ĺ�����Ȼ��ѧ�����ش���Ŀ��������������������ȫЭͬ���Ƽ�Ӧ����֤����Ŀ�������ֻ��ڳ����Ϻ������ٿ�����Ŀѧ�����ʼ��ִ�ѧ����Ժʿ��������ѧ������Ժʿ����������ҵ��ѧ���Ӳ�Ժʿ���廪��ѧ�Ժʿ��������Ȼ��ѧ����ίԱ����Ϣ��ѧ����������Σ��й��Զ���ѧ�ḱ���³����ɺ���ڣ���Ŀָ��ίԱ��ίԱ�����ִ�ѧ��...
2017 IEEE����ģ����֤��ȷ�����ֻᣨIEEE International Workshop on Model-Based Verification & Validation��
2017 IEEE ����ģ�� ��֤ ȷ�� ���ֻ�
2017/6/23
Costs entailed by software failures demonstrate that the systematic development of software in a certain quality is still a challenge, even after decades of research. A reason for this can certainly b...
�������ֻ������ض��Ļ���ģ�͵ķ�������֤��ȷ�ϣ�International Workshop on domAin specific Model-based AppRoaches to vErificaTion and validaTiOn��
�������ֻ� ���ض� ����ģ�� ���� ��֤ ȷ��
2017/2/15
Recent years have witnessed the emergence of domain specific model-based approaches for verification and validation in software development. These approaches are tailored to specific needs and use dom...
Ϊ�����ѹ��λ��ƽ̨���ٶ�λ�ľ�ȷ�ȣ�������һ�ֱ���ѹ��λ��ƽ̨������ѹ�����λ�ƹ�ϵ�Ķ�λģ�͡�����ѹ�繤��̨�ڿ��١����г̾�ȷ��λ�����л���ѹ���մɳ������Լ�������̬���Ե�Ӱ�죬���IJ���Bouc-Wenģ������ѹ���մɳ������ԣ������ѹ�繤��̨�Ķ�̬���Խ��й�ͬ��ģ��ʹģ��ͬʱ����ѹ�繤��̨�Ķ�̬������������ԡ�Ϊ����֤ģ�͵���ȷ�ԣ���˻���ѹ��λ��ƽ̨�������������ʵ���豸��ģ�ͽ���...
��������ʱ��֤��һ�ֽ������������ͨ����س����������������Ƿ�����������ʵ���������֤���������ڸ������ʵ�����ʱ��֤�г������߶��ʱ�俪�����谭�˸ü����ڲ����ϵͳ�е�Ӧ�á������������������о���״��������������ϣ��Ӹ��Ʋ������������ʱ��֤Ч�ʵĽǶȳ������ۺϿ�������Υ��������������֧��������DZ�ڿ����Ż���Լ���أ������Ŀ��Լ���µ���������ʱ��֤���ټ�����ܡ��ÿ�ܰ���������Ŀ��Լ��ģ�͡���...
2015��11��3�գ��ɰ���ʡ�Ƽ�����֯�������й��˹�ҵ���Ź�˾���й���ѧԺ���������о������й���ѧ������ѧ���й������ع����ŵ���һ���о������ձ���ѧ������������ѧ���й���ѧԺ�Ϸ����ܻ�е�о����ȹ����ⵥλ�Ķ���Ժʿ��ҵ��֪��ר�ң��Ժ��ܰ�ȫ�����о������Ƶġ��й�Ǧ���о���Ӧ�ѽ���ʽ����������֤ƽ̨�������˳ɹ�������ר����һ����Ϊ�����й�Ǧ���о���Ӧ�ѽ���ʽ����������֤ƽ̨�ٽ������ͷ�Ӧ��...
�����β�������ֵ����˻�����ȡ����ˮƽβ���ʹ�ֱβ�����������ẽ����ȶ��½����ر��Ǻ� �����Ϊ�������������⣬���һ��С�ͷ����������˻�ȫ���̷��п����ɡ���ij�ͷ������ַɻ������ȷɻ�Ϊ�� �ƶ������÷ɻ�������ẽ����������ԣ����������ṹ���÷�ʽ���ֱ��������ẽ�����������ơ����� ��ʵ���Էɽ���������ÿ������ܹ��ܺõظ��������Ĺ켣��������Ч�����Ʋ���Ŷ����������õĹ���Ӧ�ü�ֵ��
�����β�������ֵ����˻�����ȡ����ˮƽβ���ʹ�ֱβ�����������ẽ����ȶ��½����ر��Ǻẽ���Ϊ�������������⣬���һ��С�ͷ����������˻�ȫ���̷��п����ɡ���ij�ͷ������ַɻ������ȷɻ�Ϊ���ƶ������÷ɻ�������ẽ����������ԣ����������ṹ���÷�ʽ���ֱ��������ẽ�����������ơ�������ʵ���Էɽ���������ÿ������ܹ��ܺõظ��������Ĺ켣����������Ч�����Ʋ���Ŷ����������õĹ���Ӧ�ü�ֵ��
�����β�������ֵ����˻�����ȡ����ˮƽβ���ʹ�ֱβ�����������ẽ����ȶ��½����ر��Ǻẽ���Ϊ�������������⣬���һ��С�ͷ����������˻�ȫ���̷��п����ɡ���ij�ͷ������ַɻ������ȷɻ�Ϊ���ƶ������÷ɻ�������ẽ����������ԣ����������ṹ���÷�ʽ���ֱ��������ẽ�����������ơ�������ʵ���Էɽ���������ÿ������ܹ��ܺõظ��������Ĺ켣����������Ч�����Ʋ���Ŷ����������õĹ���Ӧ�ü�ֵ��
����2015��4��15�մ��й�����ƹ�������Ժ31����Ϥ������������H��³����������Ʒ���ȡ���ش�ͻ�ƣ����ڱ��½�����ʽ����������֤�����ȡ�óɹ�����ζ���й�H��³����������ƽ��״γɹ�Ӧ���ں��췢�����������������������ָ��Զ����롢����������ϵͳ����������Ϲ�ϵ����ö��ֲ������ٵ����ſ��ơ�������˵�������÷����������ܣ�ӵ�С�����˼ά��ʶ�������������й�����ͨ��ѹ����ת�ٵ�֮�����Ϲ�ϵ��...
������ˮ��ͧ��USV��Эͬ������λ�����ǽ��������ҵ�����µ����������Ҫ;������Ե���ͧ������ʽ��USV��Эͬ������λ���⣬������Эͬ��λ��״̬�ռ�ģ�ͣ�Ȼ������ģ�����˲�ֵչ�����õ�������ϵͳ�����Ի�ģ�ͣ�������չ�������˲��㷨������Ϣ�ںϣ����˫ͧ��ľ��롢�Ƕ���Эͬ��λ���ȵĹ�ϵչ���о�����Эͬ�����˲��㷨ʹ��������������˿ɹ۲��Է������о�����������������ʱ������֮ͧ�����ͽǶȱ仯��...
��Ϊ���ģ��Ĺ��ߣ�Ŀǰ�Ļ������ϵͳ��ֲ�ʽ���ӻ���չ���ⲻ���ѧ��������ģ���ִ�й��̣�Ҳ��ɢ���о������о��ľ�����Ϊ�˱����о��˻����Ļ������ϵͳ�����Ƚ�����Matlab�е�Simulink���滷����Ȼ������˻���Simulink�Ļ������ϵͳ���������˻��ģ��ִ���еĹؼ����⡣���ֱ����üļ���ϵͳģ�ͺ���ʵ�ļ���ϵͳ�����˻������ϵͳ��������֤����������������������ϵͳ��ģ��...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...