
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ʵ������ؼ�¼238�� . ��ѯʱ��(0.259 ��)
�й���ѧԺ�����Ƚ������о�Ժר�����ƻ�����ϵͳ��ʵ������
�й���ѧԺ�����Ƚ������о�Ժר����һ��ʵ��C��ϵͳ�涯�˶��Ŀ���װ�ü����Ʒ���
�й���ѧԺ�����Ƚ������о�Ժ ר�� C��ϵͳ �涯�˶� ����װ��
2023/11/6
�й���ѧԺ�����Ƚ������о�Ժר����һ��ʵ��C��ϵͳ�涯�˶��Ŀ���װ�ü����Ʒ���
�й���ѧԺ�����Ƚ������о�Ժר����һ��ʵ���������ĥ��е�����߱�̵ķ�����װ��
�й���ѧԺ�����Ƚ������о�Ժ ר�� �������ĥ ��е�� ���߱��
2023/9/13
�й���ѧԺ�����Ƚ������о�Ժר����һ��ʵ���������ĥ��е�����߱�̵ķ�����װ��
�й���ѧԺ�����о���ר����һ�ָ�ͨ���Զ�����ʵ��ԭλ��������ʴ������װ��
�й���ѧԺ�����о��� ר�� ��ͨ�� �Զ��� ԭλ���� ��ʴ�� ����װ��
2023/8/11
�й���ѧԺ�����о���ר����һ�ָ�ͨ���Զ�����ʵ��ԭλ��������ʴ������װ��

���Ƕ��ɻ����˵����������Ѿá�20����60������ƻõ�Ӱ�������ó̡�������һ����С��ϸ����С�ġ���DZͧ�����������������������ʵ�����У���ѧ�Ҵ�δֹͣ���ɻ����˵�̽�����ر��Ǿ��������ƽ��͵�������������������ˣ�������Ե���������е������������;��ȶ��ܵ��㷺��ע��
��ȫ��Χ����߲�����Ϻͼ�������������в�Ԥ���Ĺؼ�������������⣨NAATs����ȿ�ԭ��������и��ŵ������ȡ������ԺͿ��ٲ���������Ȼ������ǰ���� NAAT ���Զ������ƽ̨�����ʵ�����ɵ�Һ�崦�����������Զ��������̣��������ǵ��豸���ء������Լ���Ĵ���Ҫ�����İ�װ��ά��Ҫ���������������������

�й���ѧԺ�����Զ����о����ռ�����չ�������������Ӵ�����ʵ��ȫ��ų�������ͼ��
���� ���Ӵ����� �ռ�����չ��
2022/11/14
���п�Ժ���ҿռ��ѧ���ķ�����Ϣ���ҹ���̨�����з������Ӵ������غɡ�����CPTԭ�Ӵų����ܲ���ϵͳ����2022��7��27�մ��ؿռ��¼����������ǣ�SATech-01���ɹ����䡣2022��11��7�գ��������Ӵ������غɵĿռ�����չ���ڹ�ɹ�չ�����غɽ����ڹ쳤�ڹ����Σ�Ŀǰ�Ѿ���ȡ���������Ч̽�����ݣ��ɹ�ʵ����ȫ��ų�������
�й���ѧ������ѧ���Ƴ�ȫ���̻�����ѧ�� ����ʵ�����ܻ�ѧ��ʽ
�����ƶ������� ��ѧ����վ ���ܲ���ϵͳ ��ѧ���ݿ�
2022/10/8
�����˲����ܳ�Ϊ��ѧ�ҵĿ������֣����ܳ�Ϊ��ѧ�ң��й���ѧ������ѧ���й��ƴ���������Ŷ�ͨ�������з��ɹ������˿϶��Ĵ𰸡�

Ϊ��ף��ۻع�25���꣬�᳹ϰ��ƽ��ϯ������۴��Ʒ�չ����Ҫָʾ�����ƶ��߿Ƽ��з���ʵ�����������ᣬ2022��7��6�գ��й���ѧԺ��۴����о�Ժ�˹�����������˴�������(CAIR,Center for Artificial Intelligence and Robotics��Hong Kong Institute of Science&Innovation,Chinese Academy of...
2022��3��31�գ���һͷ��ͨ�ġ����С�ĸ������110�죬������7ͷ��¡����С�������������Զ���������ɿ�¡ȫ���̻�õĿ�¡������Ͽ���ѧ�����Ŷ�ʵ��ȫ���̻������Զ�������������¡����Ϊ�����״Ρ�
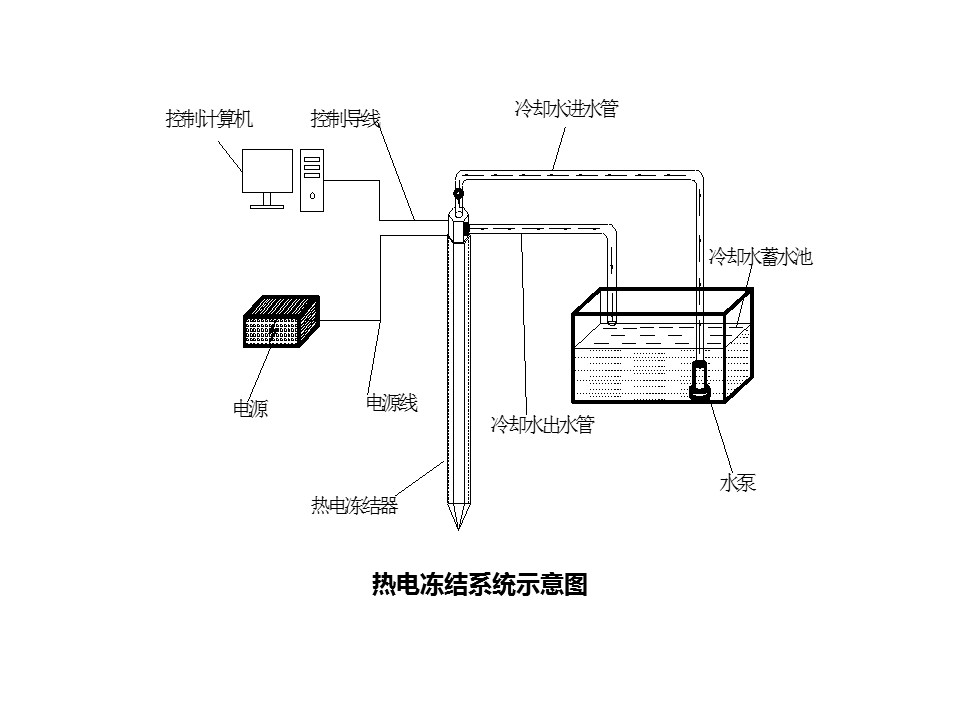
�й���ҵ��ѧ(����)��ѧ�뽨������ѧԺһ�����Ͷ�������������ר��ʵ���ɹ�ת����ͼ��
��������������ר�� ��Լ����ɱ� �䶳վ
2022/1/14
������Ժ�����й���ҵ��ѧ(����)��ѧ�뽨������ѧԺ�ǹ�ϵ��������������������ϻ���ѧԺ��˻������Ŷӣ���ͬ�з����ȵ������˹��ز㶳��������ר����ר��ʵʩ���ɷ�ʽʵ���ɹ�ת����
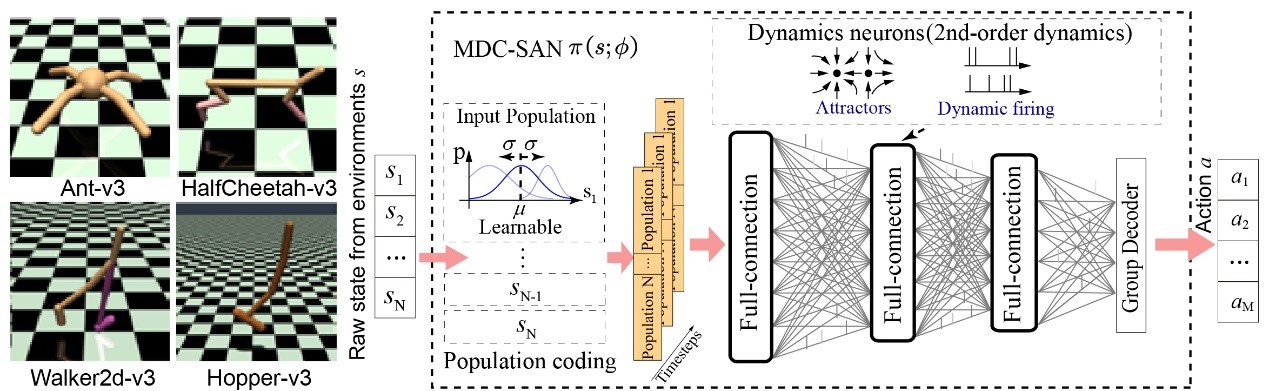
�й���ѧԺ�Զ����о������������о�����ͨ����߶ȶ�̬����������������ʵ����Чǿ��ѧϰ��ͼ��
��������� �������������� ��߶ȶ�̬����
2021/12/13
����������� (Deep Neural Network��DNN) �İ����£����ǿ��ѧϰ�����ิ��������ȡ���˾�ɹ�������Ϸ������˿��Ƶȡ�Ȼ�������ǿ��ѧϰ��ʽ����֪������ǿ��ѧϰ��ʽ��Ȼ�����Զ���������и��������Ⱥ�������и��Ӷ���ѧ��������Ԫ�����룬�����þ�����������Ŀ�����ѧϰ��������һ���γɸ��ӵ���֪���ܡ����ڣ��Զ��������������о������첨���������Ŷӣ�ͨ��������ϵͳ�ж�߶���Ϣ...

��ǰ�������������NIR-II��1000-1700nm��ӫ�������������ҽѧ�����о����������о��г����ٴ�ת������չ�ֳ����Ӧ��ǰ��������ڽ�����һ����NIR-I��700-1000 nm�������������ӫ��������߱�������������ɢ��͡���֯�����ҳ���ֱ��ʸߵ����ƣ���ʹ�䱻��Ϊ���߷�չDZ����Ӱ������

�廪��ѧ���ڹ����о���Ժ�ŕF���������ŶӺ������þ������ʵ�������ͻ����˸����ԣ�ͼ��
�廪��ѧ���ڹ����о���Ժ �ŕF ������ ���� �ͻ�����
2021/7/5
�����ͻ����˾��������Ļ�����Ӧ�ԡ��ж������ԺͿɼ�Ⱥ����ҵ���ص㣬���ֺ��Ѿȡ�������⡢��������������С�ռ���ҵ���Ͼ��м����Ӧ��DZ�������ǣ��������Բ��Ͼ��еնȡ��ױ��ε��ص㣬����ִ�л����ձ�������������������˶����Ȳ�����⣬�����Ի����˵�����˶��;�ȷ���ƴ�����ս��

������չ�������Ŵ�������������ںϷ�չ�Ľ�������˵ķ�������չ��˥�˹����У�����ʼ�հ������Խṹ�������ܳ������顣�Ҳ�˵��ͬ��ͥ������ͬ������������֮��ıȽϣ���ʹͬ����ѧ������Ⱥ�����ϻ����̵ĸ������Ҳ�������ԣ������˶�������������ȸ���������ͼ1�������磬ͬ����70���Ⱥ�壬�е��˻��ܹ��������Ƶ���ѧ��ʽ���е��˵���������ȿ����Ѿ�˥����һ��롣����֮������֪����Ķ������������Ը�...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...