
搜索结果: 1-1 共查到“控制科学与技术 绳驱动连续体机器人研究取得进展”相关记录1条 . 查询时间(0.231 秒)
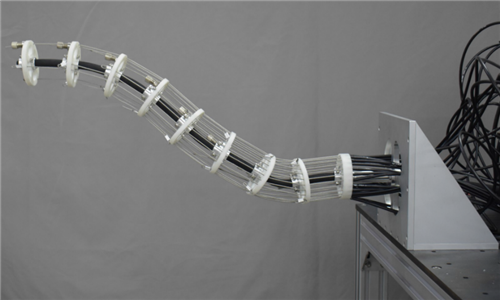
中国科学院宁波材料技术与工程研究所精密驱动与机器人团队利用了绳索的高效力传导以及具有本质柔性的特点,研发了具有多个关节模块的绳索驱动连续体机器人臂,绳驱动机器人臂采用多根轻质绳索协同驱动,与传统主动关节驱动的机器人臂不同,绳驱动机器人臂是由被动关节支撑,主动绳索驱动,由于主动绳索的驱动装置全都安装在机座上,因此绳驱动机器人臂具有自重轻、转动惯量小和易于实现变刚度控制等优点,既能够产生本质安全的运动...