
�������: 1-15 ���鵽�����ա������ѧ���� �ռ����������ؼ�¼37�� . ��ѯʱ��(0.224 ��)

�й���ѧԺ��������̨�뱱���ռ������������Ʋ�ǩ��̫������ս���Ժ���Э�飨ͼ��
�ռ������ ������Ʋ� ̫������ ս���� ����Э��
2021/3/19
2021��3��17�գ��й���ѧԺ��������̨�뱱���ռ������������Ʋ��ھ�����̫��̽������ս�Ժ���Э��ǩԼ��ʽ���ռ������������Ʋ�ԺʿҶ�ཨ����ʦ���Ϸɡ����������¡��������������з���ʦ������ȣ�����������̨̨���������п�ԺԺʿ�����L���о�Ա��Ԫ�¡��о�Ա���㻪���쵼����ؿ�����Ա��ϯ��ǩԼ��ʽ��ǩԼ��ʽ�������������֡��ռ������������Ʋ����������¡���������̨̨����������˫����Э����ǩ�֡�
��Ե����ٽ��ռ�����������һ����������ʽ���ƽ��������÷������õ������赲�ŵ磨SDBD����Ϊ��������Դ��������ڽϴ���ѹ��Χ����Pa~1atm���ڵ�����������������岢����������Ϊ̽��������ʽ���ƽ��������������ܣ�������ʵ�������ڶ����ѹ�͵�ѹ�����²������������������������ʾ��10~90kPa��ѹ��Χ�ڣ�ʵ������������������10��2~10��3��N��������ѹһ��ʱ��������������������ѹ���ݴ����...
ʵ�ֶ��ٽ��ռ�������IJ��ͨ������ʵ���鱨�ռ��������ӡ�ͨ���м̡��ԿնԵ���ս������Ĺ㷺Ӧ�õ���Ҫ����֮һ�����Ka�����ٽ��ռ���������ͨ����·���ŵ������������˰�������˥�����ྶ˥�����Ӱ�ڱε����ص������ŵ�ģ�͡�ͨ������֤���˽�ģ�ĺ����Ժ���ȷ�ԣ��������Ϊ�ٽ��ռ����������۲ο�ģ�͡�

2015��12��11�գ��й�����ѧ���ٽ��ռ������רҵίԱ�ᣨ���רί�ᣩ�����������ѧ���������ڳɶ��ɹ����С����λ������ٽ��ռ������רҵίԱ�����죬רί��ҿ���λ�к���ҵ�ɶ��ɻ�����о����а죬���������Ϊ�����ͨŦ�����ٽ�ѧ����������רί�ḱ����ίԱ���վ�װ���о�Ժ������ԭ������������߹����ֻ��顣

�Ϻ���ͨ��ѧ���պ���ѧԺ�ٽ��ռ��о����ij��еġ��߷֡�ר������ij����ƽ̨������2015��9����Ѯ���½��������飬�ﵽ�����Ҫ�������Ŀ�ģ�ȡ��Բ���ɹ���������ѧ������ѧ�����ѧ�빤��ѧԺ�ٽ��ռ�ϵͳ���弼���о��������˱������飬���ṩ����Ա�뼼��֧�֡�
���ڳ���չ�ұȹ��͵ĵ����ٽ��ռ���������ԣ������������������нṹ���ηdz���������˻��ڼ���������ѧ�ķ����������ڶ���������˷dz��ߵ�Ҫ��Ϊ�ˣ������һ�������ڱ߽����εĶ�������ԣ����ֶ��������ӳ���˼�룬���߽������λ�ñ仯��ij��Ȩ�ط�ӳ������������������ڵ�λ�á�ѡȡ���뵹����n�η���ΪȨ�أ��о���ͬ��Ȩ��ָ��n��������ε�Ӱ����ɣ�Ȼ��չ�˶�ά����ά������ʵ���������������������...
�����ռ�������ı�ṹ����
���Կռ� ������ ��ṹ����
2013/7/29
�����о��˴������Խṹ�ռ�������Ŀ������⡣�����趨ģ̬��,��ϵͳ��Ϊ���ַ�������������ϵͳ����ϵͳ�Ƿ����Ե�,�����˶�������������ת�������˶�,����ϸ�������˱�ṹ���ƹ��ɵ�Ӧ�á�
ϵͳ���о�����ζ��ٽ��ռ������������Чʵʱ���ٵ����⣬�������һ�ֻ���Լ��������С����������Ӧ����ʽ��ģ�ͣ�CTLS-AIMM���˲����ϵ�ʵʱ�����˲��㷨�����ȿ��ǵ��ٽ��ռ���������ص㣬ѡ��ʹ�ú���Ԥ������ϵͳ̽��Ŀ������������ʹ��Լ��������С�����㷨��CTLS����Ŀ����дֶ�λ��Ȼ���ڴֶ�λ��Ϣ�����ϣ�ʹ������Ӧ����ʽ��ģ���˲��㷨��AIMM����Ŀ������������ʵʱ���١���AIMM�У�������...
�ռ�������ý���������
��������� ���������� ������װ�� �������
2012/12/10
���ǽ���������ϵ���Խ�ԣ�����˲��ý��������������ļ��������ռ������������װ�������������˽�������������ѧģ�ͣ�ȷ���˽��������Ľṹ��Ʋ��������ܲ��������Բ������������Ƶ�������װ���������ѧ�����������������������װ��ĵ�����ʵ�鲢��������ʵ�鿼�ˡ�ʵ�������������������������ʵ����֤�������һ�£��ն��������Ҫ������ڸ���������ʽ�����ý���������...
���ռ������³������ӦBackstepping����
���ռ������ ���ݿ��� ���Ź۲��� ƽ��פ��ʱ�� ³������Ӧ���� �����������
2011/7/18
��Ա�����ռ������(near space vehiele, NSV)����硢��ģ̬�����ԣ��о�����̬��³������Ӧ���ٿ������⡣���ȣ������Ʊ���NSV�л�������ϵͳ�ĵ�һ�ҹ⻬����������Ʒ������Խ��������ģ̬�л�����������ƶ������䡣��Σ�����л�˲�临�ϸ��Ŵ��ڲ����������⣬����һ��ͬ���л��ĸĽ����Ź۲�����Ʒ��������Ľ����Ź۲����������⻬����������������ɲ�ȷ������NSV�л�������ϵ...
���Ϳ���Terminal��ģ�����ڽ��ռ�������ϵ�Ӧ��
��ģ���� �ն������� ���ռ������ �۲��� ��̬��ģ �������о�
2010/10/12
Ϊ�ӿ�Terminal��ģ�����ٶ�,���������������,���ȷ�����Terminal��ģ���������ԭ��,�������������Terminal��ģ�������������оݡ�Ȼ��,������������ͷ��������Terminal��ģ,�������ٶ����������������б�����Terminal��ģ;����������ʱ�乫ʽ�������Ϳ���Terminal��ģ�붯̬��ģ����,�����˿���������,����˽��ռ�������졢����·�����������øĽ��ķ�����...
�칬һ��Ŀ�������������װ--2011������ ʵʩ�״��ռ���������˽���Խ�����
�칬һ��Ŀ������� 2011�� �ռ���������˽���Խ�����
2010/8/18
�й����˺��칤�����ŷ����˽����ʾ���ҹ����˺��칤�̵�һ���ռ�����Խ�Ŀ�ꡪ���칬һ��Ŀ�������������װ��Ŀǰ��ȫ��ת��������ۺϲ��ԽΡ������һϵ�е����ܡ���ѧ���ܺ������ܲ��Ժ�����������2011�귢�����Ԥ�������֮��������۰˺ŷɴ�����֮����Խӡ�
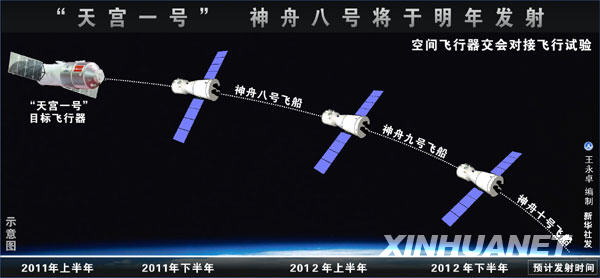
��ʱ��50������˺��칤�̵���η��䳡������������ھ�Ȫ���Ƿ�������Բ����ɡ����ߴ��й����˺��칤������Ϥ�����κ������ҹ��״��ռ���������˽���Խ������������е�һ���ۺ�������Ϊ��һ���Ż����Է������̡���ָ֯�ӷ�����ϵͳ�ӿ��ṩ�����ݣ�������Խ������˳��ʵʩ�����˼�ʵ�Ļ�����
��Խ��ռ�����������ٶȼ��ߣ����������仯���ң�����Ŷ����ƾ���Ҫ��� ���ص㣬����˻��ڶ���̬Terminal��ģ�Ŀ��Ʒ�����Terminal��ģ��������ʱ�������� �����Լӿ���ϵͳ�����ٶȣ�����̬��ģ�����룬ʹ�û�ģ�漰�䲿�ֽ���Ϊ�㣬���� �õ���ʱ�䱾���������Ŀ���������Ч�˷��˴�ͳ��ģ�Ķ������⡣������������� ����̬��ģȥ���������Խ�Ժ�������Ʒ�������Ч�ԡ�
����δ���ռ������������Ƶ���Ҫ, ��Ի������뻷��, ��չ��̽���ߺ������ڲ�ͬ���� ����������������Ԥ��������������������Navier\|Stokes������ֵ��, ���ɷ������� ���ù��̼��㷽��, ��ͨ���ź���Ԥ���������������������Ե���������뻷���ļ���� ����֤���㷨����Ч��, �����ڻ������뻷����, ��ֵ�������ռ���������������������� ���������ԡ�
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...