
搜索结果: 1-4 共查到“机械工程 机器人与智能装备技术重点实验室”相关记录4条 . 查询时间(0.294 秒)

机器人磨抛作业属于连续接触式加工,在磨抛过程中不仅要对机器人进行精确的位置控制,还要进行接触力控制,以提高加工精度。目前工业机器人进行力控制的方法主要有两种,即通过控制机器人关节力矩的直接力控法和利用机器人外部附加装置的间接力控法。前者需要建立准确的机器人动力学模型,并且机器人的大惯性会影响力控的动态响应速度和精度。后者可通过增加一个具有力控制功能的末端执行装置,与机器人通过宏微协调实现精准的力控...
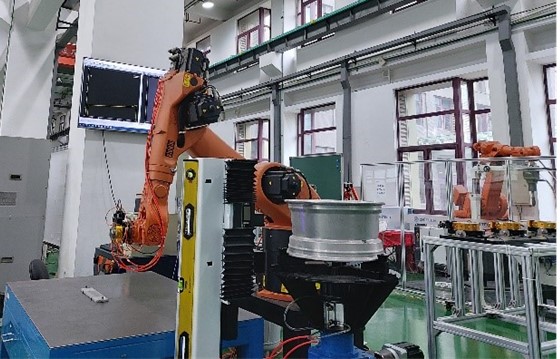
实验室针对金属零件表面强化、残余应力消除及曲面成形校形等工程问题,与超声团队合作,在研制超声波校形装置的基础上,结合先进机器人布局优化、运动学标定等技术开发了机器人化超声喷丸校形系统,填补国内超声波冲击处理智能化装备空白,为航空航天、汽车工业、精密模具等领域关键零部件高效高质量加工提供技术支撑。项目突破了以下关键技术:
机器人化超声喷丸校形系统布局优化:通过建立KUKA KR60-3机器人的运动...

并联机器人具有运动部件质量小、定位精度高、结构刚度大等优点,广泛应用于电子制造、食品加工、物流仓储等领域。现有四自由度并联机器人,仍存在着工作空间小、高速运动下定位精度低、机器人操作复杂等缺点,限制了在高端制造业中的推广应用。团队在并联机器人构型设计、误差补偿、控制策略开展了系统性研究,设计了一种新型高速高精四自由度并联机器人,并开发了集成视觉定位模块的并联机器人控制系统,可有效解决3C装配、上下...