
搜索结果: 1-12 共查到“航空、航天科学技术 高动态”相关记录12条 . 查询时间(0.189 秒)
为了平衡载波锁相环(PLL)的动态适应性和跟踪精度的要求,针对GPS三阶载波锁相环在混合动态情况下呈现的切换特征,建立了GPS三阶载波锁相环的线性切换模型。基于切换系统稳定性理论对所提出的模型进行了分析,并提出了基于线性切换系统稳定性判据的GPS三阶载波锁相环渐近稳定充分条件。利用软件接收机和混合动态轨迹验证了具有切换特征的GPS三阶载波锁相环的性能。实验结果表明:混合动态情况下,满足切换稳定性条...
高动态卫星信号模拟器四阶相位合成器设计
北斗二号导航系统 相位合成 高动态 最优控制
2012/4/11
为实现北斗二号导航系统卫星信号模拟器产生的信号对高动态条件下载体特征的准确表示,设计了一种四阶相位合成器。理论分析了由量化误差引起合成器各阶次状态间的误差传递效应,提出了非对称结构的优化设计,以平衡各阶次状态误差对最终相位状态的贡献权值;对非对称合成器进行合理的线性化近似,构建状态偏差平方和的目标函数,并给出了使其最小条件下求解各阶控制量最优值的方法。最后对高动态仿真信号进行捕获跟踪分析,结果表明...
高动态卫星信号模拟器四阶相位合成器设计
北斗二号导航系统 相位合成 高动态 最优控制
2012/4/11
为实现北斗二号导航系统卫星信号模拟器产生的信号对高动态条件下载体特征的准确表示,设计了一种四阶相位合成器。理论分析了由量化误差引起合成器各阶次状态间的误差传递效应,提出了非对称结构的优化设计,以平衡各阶次状态误差对最终相位状态的贡献权值;对非对称合成器进行合理的线性化近似,构建状态偏差平方和的目标函数,并给出了使其最小条件下求解各阶控制量最优值的方法。最后对高动态仿真信号进行捕获跟踪分析,结果表明...
研究了低载噪比与高动态环境下的深空测控系统频率估计算法,在分析已有方法不足的基础上,提出了一种基于无迹卡尔曼滤波(UKF)的闭环载波跟踪方法。此方法结合了锁频环鉴别器和UKF的优点,获得了宽的估计范围,高的估计精度和低的载噪比门限。在分析UKF模型的基础上,此方法还减少了原有UKF算法的运算量。仿真过程模拟了接收机的高动态运动轨迹,结果表明此法具有较好的动态适应能力、收敛性能和跟踪精度,能够有效地...
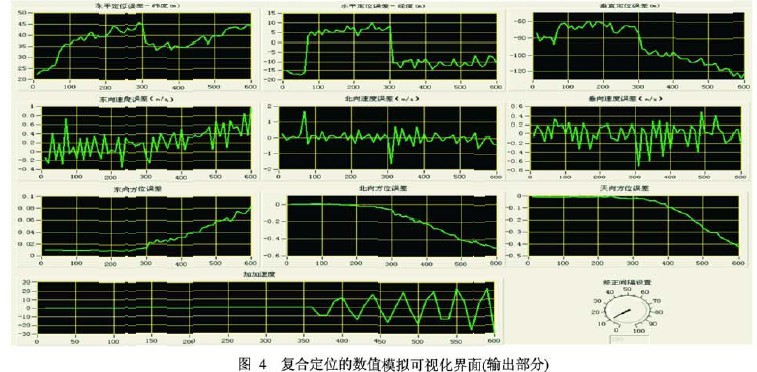
当航天飞行器在高动态条件下长时间飞行时,单纯的惯性定位无法满足精度要求,采用卫星辅助惯性测量单元定位,可以大大提高精度。高动态卫星定位和惯性测量与低动态相比,区别在于高动态面临诸多可靠性和精度问题需要得到有效的解决。为此,针对高动态问题构建了相应的组合模式及流程、设计了高动态惯性/卫星复合定位的总体方案,如图1所示。
针对卡尔曼滤波算法中动力学系统模型以及噪声模型不能精确已知,导致卡尔曼滤波算法在实际中不能实现最优估计。首先分析了传统卡尔曼滤波算法中各种误差源的影响,以及区间矩阵运算的影响,经分析得到,区间运算可以保证集合映射的完全性,但不能体现最优化。通过分析,本文提出了一种新型的区间卡尔曼滤波,将各种误差源归约到先验估计值区间和后验估计值区间中,然后将区间交集运算应用于卡尔曼滤波算法。这种新算法运算量与传统...
高动态信号模拟器中的多普勒模拟算法
卫星定位系统 信号模拟器 多普勒频移模拟
2009/4/1
为了测试卫星定位系统接收机的性能,须用信号模拟器来模拟各种条件下真实的卫星发射信号。卫星信号模拟器由软件、硬件和上位机三部分组成。系统主要包含目标运动轨迹计算、误差计算、导航电文生成及信号调制发射等功能模块。中频信号处理中的多普勒频移模拟是高动态卫星信号模拟器要解决的一项关键技术。为此,提出了一种全相参的多普勒模拟算法,基于真实的高动态运动模型解算出伪码和载波的频率字,在现场可编程门阵列(FPGA...
基于考虑节点移动性和相对移动性的意愿因子,提出了一种适用于高动态移动自组织网络的稳定分群协议,它包括稳定分群算法和分群保持策略两部分。该协议在分群建立时,利用意愿因子作为群首选择的依据,并且当节点移动而使分群结构发生变化时,根据群体移动特性稳定地保持原有分群结构。仿真结果表明,和其他分群协议相比,由于意愿因子以及分群保持策略考虑了单个节点以及节点间相对的移动特性,因此该协议在高动态移动环境中有效地...
基于DSP的高动态数字解扩接收机的研究
数字解扩接收机 高动态 数字信号处理(DSP)
2000/5/10
讨论了高动态、低信噪比、长伪码序列扩频信号的伪码捕获、跟踪、载波跟踪与数据解调方法。提出了一种基于高速数字信号处理技术和现场可编程逻辑器件 ( FPGA)的全数字高动态解扩接收机方案。
鉴于高动态环境中 G P S信号参数估计和调制数据跳变检测所遇到的问题,采用扩展卡尔曼滤波方法( E K F)对信号参数进行了估计,分析了通过载波辅助技术实现伪码延时估计的原理,重点研究了一种简单的数据跳变检测和估计参数修正方法。模拟结果表明这种方法在信号参数估计精度和动态跟踪性能等方面都能够满足高动态环境的要求。