
搜索结果: 1-15 共查到“控制科学与技术 辅助”相关记录51条 . 查询时间(0.176 秒)
中国科学院深圳先进技术研究院专利:一种鼻内镜手术辅助机器人
中国科学院深圳先进技术研究院 专利 鼻内镜手术 辅助机器人
2023/9/12
中国科学院深圳先进技术研究院专利:一种鼻内镜手术辅助机器人
中国科学院深圳先进技术研究院专利:具有辅助功能充电老化功能的SMT上下料装置
基于辅助信息补偿和控制信号编码的重放攻击检测方法
信息物理系统 重放攻击 攻击检测 控制信号编码
2023/7/20
向最优控制信号中加入编码信号是实现信息物理系统(Cyber physical system,CPS)重放攻击检测的有效方法,但会造成系统控制性能的损失.如何在保证重放攻击检测率条件下降低系统的控制性能损失是一个值得研究的问题.为此,提出一种基于辅助信息补偿的控制信号编码检测方法,通过向测量值添加辅助信号补偿控制编码信号对最优状态估计的影响.首先,证明了此方案下重放攻击的可检测性,导出检测率的上界与...

中国科学院广州分院深圳先进院搭建机器人辅助胶体纳米晶数字制造平台(图)
深圳 机器人 胶体 纳米晶数字
2023/3/6
2023年3月6日,中国科学院深圳先进技术研究院(简称“深圳先进院”)材料所喻学锋、赵海涛团队及其合作者在国际学术期刊《自然-合成》(Nature Synthesis)上发表题为“A Robotic Platform for Synthesis of Colloidal Nanocrystals”的文章。该工作首次将数据挖掘、数据驱动自动化合成、机器学习、逆向设计集成构建了机器人辅助胶体纳米晶数字...
医疗机器人研究院康复与辅助机器人研究中心博士后招聘启事
医疗机器人 辅助机器人 博士后 招聘启事
2022/1/23
上海交通大学医疗机器人研究院是上海交通大学2017年12月挂牌成立的校级多学科交叉研究平台,研究院整合校内生医工、机、电、材等优势工科院系和医学院与附属医院等临床医学和医疗优势力量,致力于手术机器人、康复与辅助机器人、医院自动化与高通量机器人等领域的基础、工程和临床研究,推动医疗机器人的成果转化孵化和临床应用。
医疗机器人研究院康复与辅助机器人研究中心围绕人口老龄化带来的重大社会与临床需求,研究...
人工智能辅助诊断方法进入肿瘤诊疗指南(图)
人工智能 辅助诊断 肿瘤诊疗
2021/9/3
利用人工智能技术辅助医学诊断,具有客观高效的特点,正在成为人工智能前沿应用的热点和精准医学未来发展的趋势。
中国科学院自动化研究所中科院分子影像重点实验室在医学影像智能分析领域深耕多年,开展了从方法技术、软件系统到多中心临床应用的全链条工作。近期,由刘振宇、董迪、王坤和惠辉等领衔的微小肿瘤智能检测与分析预测系统研发2035创新团队的多项工作被写入中国临床肿瘤学会(Chinese Society...
颅内肿瘤的早期精确诊断有利于制订合理的治疗方案,提升患者的存活率及存活周期。人工智能辅助脑瘤诊断系统可减轻医生的劳动强度及工作时间,为实现肿瘤恶性程度分级的无创检测提供技术手段。但现有脑瘤自动诊断系统受到数据量的限制,且未充分利用脑MRI影像的先验信息,因此,现有方法的泛化能力较差。如何提高颅内肿瘤辅助诊断系统的泛化能力亟需解决。

中国科学院自动化研究所与多家医院合作开展多中心“影像组学预测直肠癌术后远端转移”的临床研究工作,构建了基于多模态磁共振成像的影像组学智能预测模型。该模型能够辅助医生判断局部进展期直肠癌患者术后出现远端转移的风险,从而筛选适合接受术后辅助化疗的患者。
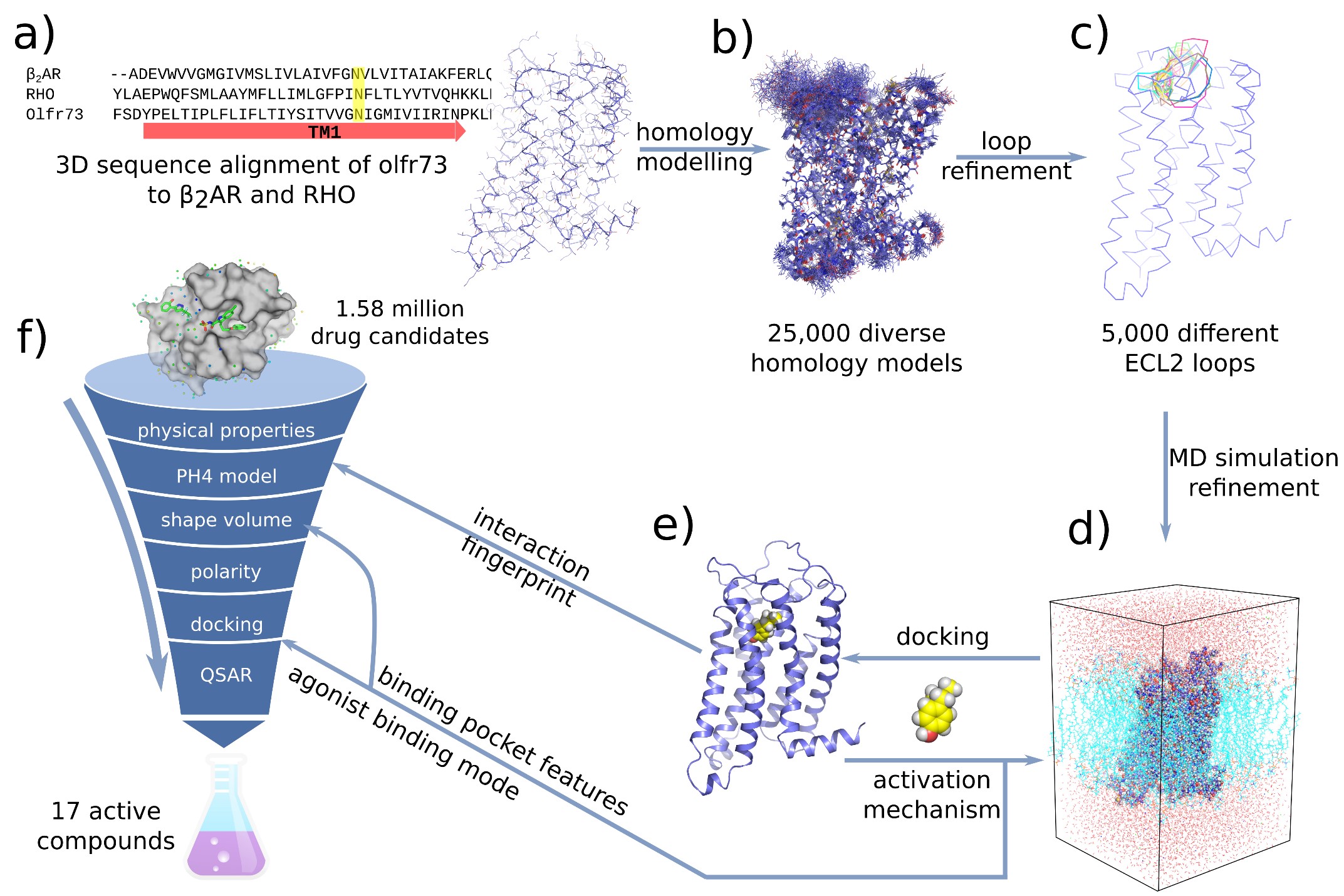
G蛋白偶联受体蛋白(GPCRs)又称七次跨膜螺旋膜蛋白。GPCRs参与着人体的各种生理功能,包括神经信号传递,细胞分化,视觉,嗅觉等。人类的重大疾病如老年痴呆症,癌症,艾滋病也与GPCRs密切相关。GPCRs是最为热门的药物设计和筛选靶标蛋白,目前40%左右的上市药物都是基于GPCRs而设计。因此研究和理解GPCRs的结构与功能,对当今药物设计至关重要。

首届机械循环辅助精品论坛在苏州举行(图)
机械循环辅助 精品论坛 苏州
2018/11/1
由苏州大学主办,泰达国际心血管病医院和北京精密机电控制设备研究所协办的第一届机械循环辅助精品论坛10月28日、29日于苏州成功举办。特邀嘉宾、首届论坛领军人物―泰达国际心血管病医院院长刘晓程教授,当代人工心脏之父Richard Wampler,德国亚琛工业大学心血管工程研究所所长暨澳洲莫纳什大学医学工程创新中心主任Ulrich Steinseifer教授,以及来自国内外学术界、产业界和临床医学专家...
讨论了空间机器人双臂捕获航天器后姿态管理和辅助对接操作的协调控制问题.首先,利用冲量定理、闭环约束几何及运动学条件获得了捕获操作后闭链混合体系统的动力学方程,并分析了混合体系统受到的冲击效应.其次,针对捕获操作后系统姿态受扰运动镇定及辅助对接操作需求,对闭链混合体系统提出了基于极限学习机(ELM)的自适应神经网络控制方案,极限学习机具有学习速度快、仅需调节网络输出权值等优点,可用于逼近系统的未知动...
引入生物控制理论来改善步行辅助中的人机交互柔顺性和多关节协调自律控制,探索一种髋关节CPG(中枢模式发生器)控制、膝关节分级阻抗控制和髋/膝关节联动控制3部分相结合的新型混合控制方法.首先,利用CPG自激振荡行为和对外交流的特性获得理想的主/从髋关节目标轨迹,并建立CPG对称抑制网络来维持左、右髋关节逆相位,以便实现复杂人机环境中的步行稳定性.其次,根据步态要求,设计高阻抗和低阻抗分级控制规律,分...
2017辅助机器人开发,测试和评估的进展与挑战研讨会(Advances and Challenges on the Development, Testing and Assessment of Assistive Robots: Experiences from Engineering and Human Science Research)
2017 辅助机器人 开发 测试 评估 进展 挑战 研讨会
2017/5/23
Assistive robots for health and welfare applications are required to display perceptual, cognitive and bodily-kinaesthetic capabilities that are natural and intuitive for older people and persons with...
2017辅助机器人研讨会(Assistive Robotics: From the Natural to the Artificial and Back Again)
2017 辅助机器人 研讨会
2017/5/22
The objective of this workshop is to explore how robotics technology can drive the restoration of function in people with movement disabilities. These disabilities are due to spinal cord injury, traum...