
�������: 1-15 ���鵽�����ƿ�ѧ�뼼�� ��������ؼ�¼96�� . ��ѯʱ��(0.264 ��)
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ�ֻ�����������λϵͳ��������λ����
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� �����˵��� ��λϵͳ
2023/12/12
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ�ֻ�����������λϵͳ��������λ����
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ�ֻ����˶�λ����ϵͳ����������
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժ ר�� ������ ��λ����
2023/11/13
�й���ѧԺ�Ϸ����ʿ�ѧ�о�Ժר����һ�ֻ����˶�λ����ϵͳ����������

½Ԫ�ţ�1920������ڰ���ʡ�����������أ��Զ����ơ����ݼ�������������ר�ң��й�����Ƽ����ſƼ�ί���ʣ��ҹ��Զ�����ѧ����������֮һ��1941�꣬½Ԫ�Ŵӹ��������ѧ���չ���ϵ��ҵ����У�����̣�1945�꣬��������ʡ����ѧԺ���죻1949�꣬������ѧרҵ��ʿѧλ����ҵ���Ⱥ�Ƹ��Ϊ��ʡ����ѧԺ���о�Ա���о�����ʦ��1956�꣬�����й���ѧԺ�Զ����о�����������1965�꣬�����齨���й���ѧԺҺ��...
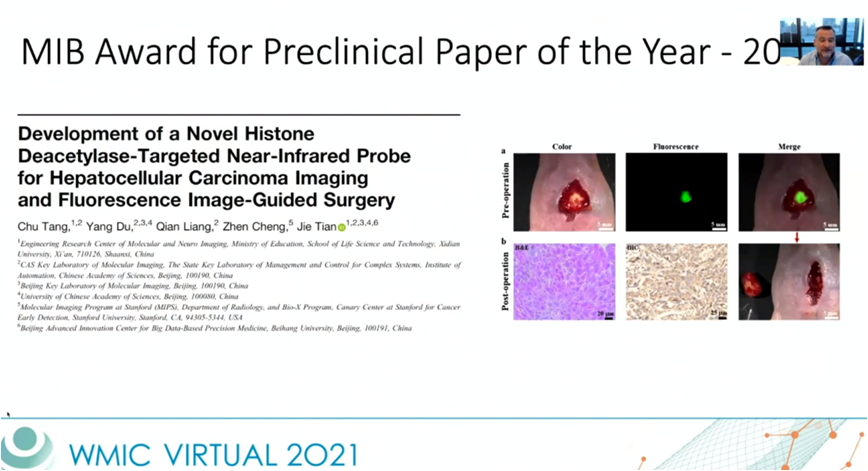
������ӫ�����̽��ɹ�Ӧ���ڸΰ������⼰��������������о����������Ӱ���ᣨWMIC��Ԥ�ٴ��о�������Ľ���ͼ��
�ΰ� ���������г� ӫ���������� ����HDAC����
2021/10/15
�ΰ��Ǿ��и߷����ʵİ��֡�Ŀǰ���ٴ��ϣ����������г���һ��������֢�Ŀɿ����ԣ�ӫ�����������ܹ��������ҽ������ʶ����г�������֯�����ǣ�Ŀǰ��Ӧ�õ��ٴ��ķǰ����ӫ��Ⱦ�������ڸΰ��ij�����Ϻ����������г�ʱ���������Բ��㼰�����Ե����⣬���ܵ�����������֯�����г�����Ը���ս�����⣬���о��۽���ƺ��з���������������������Ӱ������������ѡ���Ե�������ϸ�������������ľ��г���
����ƶ������˻�����֪����,����������λ��ϸ�����ض�λ�÷ŵ������,������̬����λ��ϸ����֪��ͼģ��(Dynamic growing and pruning place cells-based cognitive map model,DGP-PCCMM),ʹ���������뻷�������Ĺ���������֯������֪��ͼ,���л�����֪.��ʼʱ��,��֪��ͼ�ɳ�ʼ�㴦�����λ��ϸ������;�����뻷���Ľ���,�õ���ͬλ...
2017��8��ȫ����������λЭ����̳��CPGPS 2017 Forum on Cooperative Positioning and Service��
������λ ���� ������λ����
2017/2/14
��ȫ����������λЭ�����죬��������ҵ��ѧ�а��CPGPS2017Эͬ��λ�������̳����5��19��-21���ڹ������ٿ����˴λ�����IEEE�������ֻ��ṩ����֧�֣����λύ�������ģ����λ������б�¼�õ���IEEE��������ģ��ύIEEE���ͨ�������IEEE Xplore ���ݿⲢ��EI Compendex������
����������Ϊ�����ṩ��ʱ����յ�λ�á��������̬��Ϣ�������豸��Ϊ��λ��������ʱ����Դ�������Ǵ������ɻ������������������˶��������Ҫ����ϵͳ��ͬʱҲ�ڵ�����Ϣϵͳ����ز�������Դ̽����ڶ༼��������Ҫ���á�����ϵͳ������������Ϊ��Ϣ��������ʩ������Ҫ����ɲ��֣������ش����ᡢ���ú;��¼�ֵ������ȫ�������ȫ�������������Ժá��������ȸߡ������ʸߵ�������Ȩ����ϵͳ�������γɶ�������������...
SINS/DVLˮ�³�ʼ���붨λ����
SINS/DVL ��ʼ�� ��Ԫ�� ��λ����
2016/12/25
�ڽ��г�ʼλ����Ϣ�������£�����һ��SINS/DVL�������ϵͳ��ʼ���붨λ�����ķ������Թ�������ϵ��ΪSINS����IJο���������DVL��������Ϣ������Ԫ���������˲����г�ʼ�������������ڹ���������������ϵ�µ�λ��������ת������������ϵ������ڶ������м�������Ժ�Ķ�λ�����������������ݱ������÷����ܹ�ʵ��SINS/DVL�������ϵͳˮ�º����ʧ�dz�ʼ���붨λ����������600 s����...
���X���������������к�����ģ�͵�ǿ�����ԡ��߽�ģ�Ͳ�ȷ���Ե����⣬���Ӧ�÷�����Ԥ���˲�(NPF)�㷨ʵʱ���ƺ������Ĺ����Ϣ�����ȣ���������ģ�Ͳ�ȷ���Ե�X������������������ָ�꺯�����Ż��õ�����ָ�꺯����С��ϵͳģ�����ֵ��ͨ������ģ�Ͳ�ȷ���Ե�Ӱ������ߺ������������쾫�ȡ���STK���ɵġ�����̽·�ߡ��͡����ǿ쳵����������һ�š����ֺ�����������ݽ��з��������������������㷨��EKF�㷨��...
����ģ����������һ�����͵���������, ����������������״̬������ģ����Ϣ����������ϵͳ��Ϣ���ں�, ��������������ȺͿɿ���, �������ܵ�������ѧ�ߵĹ�ע, ������Ϊ������������������������. ͨ��������ģ�������������о���״�ĵ��кͷ���, �����˸����������ĸ�����ԭ��; ������Ŀǰ��Ҫ��3 �ּ����������C����ģ��/���������ںϡ�����ģ��/���������ںϡ�����ģ��/����/���������ںϵĸ����ص�;...
�й���ѧԺ�������ϼ����빤���о�����������ȫ���ƶ�������ƽ̨�о�ȡ�ý�չ
���ϼ��� �������� �ƶ�������ƽ̨ ƽ�в���
2014/11/17
ƽ�в�����ѧϰ��ʻ���ܵ��ѵ㣬��ԭ��������е��������߱�ȫ���ƶ��������Dz��е���������ͳ���ƶ�ʽ������Ҳ����ͬ�������⣬��������ڿռ���С��ӵ���ij������С����й���ѧԺ�������ϼ����빤���о��������������Ƚ������������˶�������˼����Ŷ�������о�Ա�쵼�з���ȫ���ƶ������ˣ������ŶӴ�����Ƶ��˶���żʽ����������֣�ʵ�����ڴ����������µ�ȫ���ƶ���������������ƶ������˵Ļ����Ժ�����ԡ�

�й���ѧԺ������ҵ�����о�Ժ����������ȫ���ƶ�������ƽ̨��ȡ�ý�չ��ͼ��
������ �й���ѧԺ������ҵ�����о�Ժ ����
2014/11/17
ƽ�в�����ѧϰ��ʻ���ܵ��ѵ㣬��ԭ��������е��������߱�ȫ���ƶ��������Dz��е���������ͳ���ƶ�ʽ������Ҳ����ͬ�������⣬��������ڿռ���С��ӵ���ij������С������������������������Ƚ������������˶�������˼����Ŷ�������о�Ա�쵼�з���ȫ���ƶ������ˣ������ŶӴ�����Ƶ��˶���żʽ����������֣�ʵ�����ڴ����������µ�ȫ���ƶ���������������ƶ������˵Ļ����Ժ�����ԡ�
���ij�����˻�����������ϵͳ�����ͺ��ص㣬���һ�����˻�����������ϵͳ����ά���ԡ����ù� ��������ϵͳ�Ĺ���ģ�ͣ�����ϵͳ�������ϵĸ��ʣ������˸���������Ҫ�ȣ��������ı����������Ż�ģ�ͣ��� ���˿���������ϵͳ���ı��������������������ò���Ϊ����������ϵͳ��ά���ṩ�˾������ݡ�
һ�ּķ���ϵ��SINS/GPS/CNS�������ϵͳ���������˲��㷨
���ƿ�ѧ�뼼�� ���������˲� �����������˲� �����ߵ�ϵͳ
2014/7/15
�ڵ��صȸ߶�̬�������������ϵͳ״̬���̾���ǿ�����ԣ��Ҹ�״̬����Ӱ�죬��ͳ����չ�������˲�(EKF)�㷨����Ը߽����Ӱ�죬��ģ�����Ի�չ���ᵼ��ģ�Ͳ�ȷ�������������½������������˲���UKF���㷨����Ч�����������Ի���ȴ�������������ϵͳά����������������ӵ����˲����㸴�Ӷ�Ӱ���㷨ʵʱ�Ե����⡣Ϊ�ˣ���Է������ϵ�µ����������ϵͳ���˲��㷨��ʵʱ�Ժ߾�ȷ�Ե�Ҫ�������һ��...
���ȿ��ٵ�������ѡȡ����
�������� �����DZ� PCSM �ֲ�������
2014/5/10
Ϊ��������DZ��ֲ��ľ����ԡ������Ŀ���������,�����һ�ֻ��ڼ�����ϸ�ַ�(PCSM)��������-�ǵȡ���Ȩ�����ϵ�������ѡȡ������ͨ���ڽ��ƾ��ȷֲ���������������ѡȡ������,������֤��ѡ�����Ƿֲ�������,��������꼫ֵԽ������;Ϊ��������ǹ��������ٶ�,������k-vector �������������������������ں�ѡ��;���,�ۺϿ��������ǵľ�����������ָ��,����ˡ�����-�ǵȡ���Ȩ����ɸѡ������...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...