
搜索结果: 1-7 共查到“知识要闻 机械工程 材料技术”相关记录7条 . 查询时间(0.6 秒)

郭生参加民用飞机复合材料技术暨高端装备制造论坛并发言(图)
民用飞机 复合材料 装备制造
2023/6/21
2023年6月17日,民用飞机复合材料暨高端装备制造论坛在浙江杭州举办,为期两天的时间里,开展了民机复合材料技术分论坛和民机高端装备产业发展分论坛等活动。公司党委书记、总经理郭生在民用飞机高端装备制造分论坛上发表题为《高端装备技术发展及产业应用实践》的主旨演讲,与业内专家共同探讨纤维复合材料技术及国产自动铺丝装备存在的问题和发展方向。
中国科学院宁波材料技术与工程研究所在磨抛机器人方面取得进展
磨抛 机器人 力控 末端执行器
2023/2/2
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...
中国农业机械化研究院新材料技术与装备研究所承担的“农机部件高性能低成本增材制造技术及应用”项目通过科技成果鉴定
中国农业机械化研究院新材料技术与装备研究所 农机部件 增材制造 科技成果鉴定
2022/7/11
2022年7月8日,中国农业机械工业协会组织召开科技成果鉴定会,中国农业机械化研究院院新材料所牵头承担的“农机部件高性能低成本增材制造技术及应用”项目研发的1种材料、3种工艺和1种评价方法等5项成果通过科技成果鉴定。

中国科学院宁波材料技术与工程研究所智能医学影像团队提出了一种新的基于生成对抗网络的医学图像增强方法,称为结构和光照约束生成对抗网络(StillGAN)。

2020年12月29日,2020好设计颁奖大会暨中国创新设计大会在浙江建德举办,中国科学院宁波材料技术与工程研究所“智能全向移动机器人”项目荣获“好设计”金奖。宁波材料所副所长杨桂林代表获奖团队参加了颁奖仪式。“智能全向移动机器人”项目由精密运动与先进机器人技术团队设计开发,其采用自主研发的解耦式主动万向脚轮克服了传统全向移动机器人存在机动灵活性差、驱动效率低、对地面损伤大、噪音高、运动控制精度低...
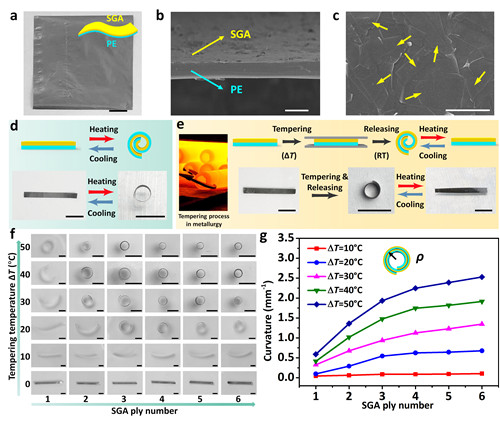
地球上的大多数生物体经过长期进化选择可根据所处的外界环境快速产生适应性自身形变和/或可控运动以躲避危险、生存繁衍。例如,自然界中的植物如风滚草在逃离干旱地区、昆虫如金轮蜘蛛在躲避天敌袭击等情况下,会选择性地先将自身变形为球状,进而通过“翻滚”运动的形式快速离开当前不利环境。通过人工合成材料的程序化可控设计、模仿甚至超越生物体的智能驱动行为,是仿生材料领域研究的前沿热点及难点之一。软体驱动材料可将外...

2018年11月22日,中国科学院STS浙江中心组织专家对中科院宁波材料技术与工程研究所承担的中科院科技服务网络计划(STS计划)“机器人化汽车轮毂表面抛光装备研发”项目进行验收,验收专家组由中科院沈阳自动化研究所义乌中心、浙江工业大学、浙江理工大学、浙江大学宁波理工学院的技术专家,以及杭州楚风会计师事务所财务专家组成。中科院科技促进发展局、中科院STS浙江中心、上海分院、宁波材料所的相关负责人出...