
搜索结果: 1-15 共查到“控制科学与技术 运动”相关记录306条 . 查询时间(0.431 秒)
中国科学院合肥物质科学研究院专利:分布式人体运动环节加速度测试装置
中国科学院合肥物质科学研究院 专利 分布式 人体运动 环节加速度 测试装置
2023/12/12
中国科学院合肥物质科学研究院专利:分布式人体运动环节加速度测试装置
中国科学院合肥物质科学研究院专利:用于分布式人体运动环节加速度测试装置的方法
中国科学院深圳先进技术研究院专利:一种实现C臂系统随动运动的控制装置及控制方法

上海科技大学信息科学与技术学院梁俊睿课题组在运动供能物联网方向提出极简工程设计方案(图)
运动供能 物联网 极简工程
2023/10/27
近期,上海科技大学信息学院智慧电气科学中心的梁俊睿教授团队针对运动供能物联网技术,在“微能量管理电路”和“小型机械俘能器”两方面分别提出了创新性的极简工程设计方案,有望进一步降低能量自给自足物联网节点的机电硬件成本,在更广使用范围和更长使用时间里让更多的物件实现信息获取和联网通信。
基于渐进无迹卡尔曼滤波网络的人体肢体运动估计
卡尔曼滤波网络 人体肢体运动估计 表面肌电信号 渐进无迹卡尔曼滤波
2023/8/21
针对基于表面肌电信号(Surface electromyography,sEMG)的人体肢体运动估计建模困难的问题,提出一种渐进无迹卡尔曼滤波网络(Progressive unscented Kalman filter network,PUKF-net),来实现降低肢体运动与sEMG量测的建模难度以及提高肢体运动估计精度的目的.首先,设计深度神经网络从sEMG数据中学习肢体运动状态与sEMG量测之...
中国科学院上海应用物理研究所专利:一种压弯机构运动控制系统
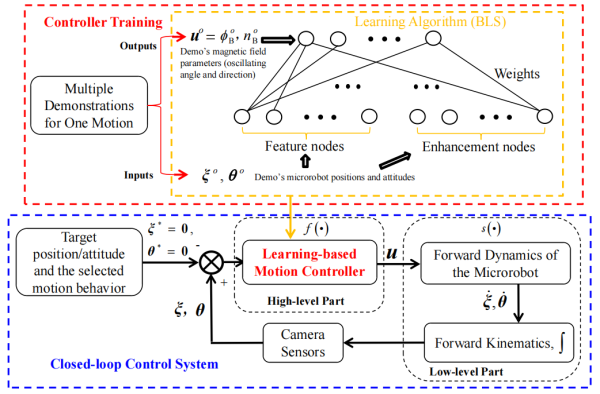
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
2023/5/18
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...

中科院深圳先进院提出磁控仿鱼微型机器人复杂运动(图)
磁控仿鱼 微型机器人 非线性
2023/5/10
2023年5月10日,来自中国科学院深圳先进技术研究院集成所智能仿生研究中心的徐升和徐天添研究团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,并且本方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。

机械臂运动学反问题的闭形式解取得进展(图)
机械臂运动学 反问题 闭形式解
2022/11/11
机械臂是目前应用最广的工业机器人。冗余机械臂是一类更加灵活、更适用于人机合作的工业机械臂,其运动学反问题与奇异性是机器人控制过程中的基础问题。数学机械化实验室李子佳副研究员与奥地利乔安娜研究所的Hofbaur教授等人合作,给出了一类冗余机械臂的运动学反问题的闭形式解。他们利用Gr?bner基等工具给出了详尽的机械臂运动奇异性分析。相关工作被机器人顶级期刊IEEE Transactions on R...
中国人工智能学会智能检测与运动控制技术专委会成立于2014年,委员来自国内近百个高校、科研院所及相关企业。2019年被学会评为优秀专委会。专委会围绕利用人工智能技术解决机电装备控制和制造业自动化中的检测与运动控制技术开展研究,主要研究领域涉及数控装备、工业(特种)机器人、车辆和流程工业、智能加工控制系统、工业机器人控制系统、AGV小车控制系统、康复机器人、带电作业机器人系统等。自2017年以来,专...

2021年11月3日上午,2020年度国家科学技术奖励大会在北京隆重召开。由中国科学院自动化研究所作为唯一完成单位的项目“视觉运动模式学习与理解的理论与方法”荣获2020年度国家自然科学奖二等奖。项目主要完成人为胡卫明研究员、刘成林研究员、李兵研究员、张笑钦教授、王恒博士。
基于软件版本NCU-SW 6.14的发布,西门子将推出专门针对数控系统 Sinumerik One 的强大工艺包Sinumerik One Dynamics,其中包括三种不同的工艺包:One Dynamics Operate包、One Dynamics三轴铣削包和One Dynamics五轴铣削包。工艺包中包含的软件功能可为用户提供强大支持,涵盖从车间中面向机床的编程,到高质量表面的CAD-CAM...

日前,我院杨洪教授课题组在光控软体机器人研究领域取得重要进展,科研团队报道了一种利用可见和红外三个波段的光去操控软体机器人运动方向的便捷调制策略。该研究成果于近日发表在国际顶级期刊《自然通讯》杂志上。
