
搜索结果: 1-15 共查到“机械工程 运动”相关记录140条 . 查询时间(0.353 秒)
西北农林科技大学专利:水陆两栖型六足仿生运动机器人
西北农林科技大学 水陆两栖型 六足 仿生运动机器人
2023/11/24
本实用新型公开了水陆两栖型六足仿生运动机器人,包括主体控制模块、传感模块、腿部模块,所述主体控制模块包括主体外壳以及安装在主体外壳内部的控制主板,所述传感模块包括前置摄像头,所述前置摄像头安装在主体控制模块的主体外壳前侧,所述主体控制模块的主体外壳四周设有六个腿部模块,所述腿部模块均安装有螺旋桨。本实用新型不仅可以靠灵活的腿部适应复杂地型,还可以依靠脚尖部位安装的螺旋桨在水上行进,前置摄像头又可以...
中国科学院合肥物质科学研究院专利:可三自由度运动的螺栓装卸机械手
中国科学院合肥物质科学研究院 专利 三自由度运动 螺栓装卸 机械手
2023/11/15
中国科学院合肥物质科学研究院专利:可三自由度运动的螺栓装卸机械手

2023年3月30日,中国工程机械工业协会冰雪运动与应急救援装备分会(以下简称:分会)年会在河北张家口市隆重召开。
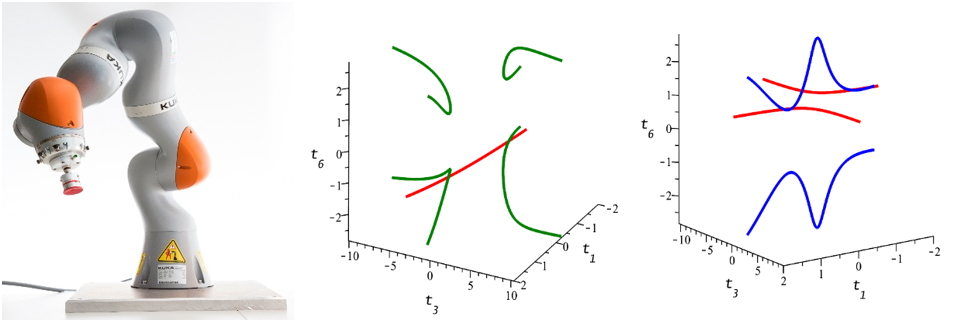
机械臂运动学反问题的闭形式解取得进展(李子佳)(图)
机械臂运动学 反问题 闭形式解 工业机器人
2022/11/11
机械臂是目前应用最广的工业机器人。冗余机械臂是一类更加灵活、更适用于人机合作的工业机械臂,其运动学反问题与奇异性是机器人控制过程中的基础问题。数学机械化实验室李子佳副研究员与奥地利乔安娜研究所的Hofbaur教授等人合作,给出了一类冗余机械臂的运动学反问题的闭形式解。他们利用Gr?bner基等工具给出了详尽的机械臂运动奇异性分析。相关工作被机器人顶级期刊IEEE Transactions on R...

2022年10月9日,中科院合肥研究院等离子体所装置主机工程研究室遥操作课题组在轻量化柔性组件机械臂的动态特性分析和运动控制研究工作中取得了一定进展。研究成果发表在中科院一区TOP期刊Applied Mathematical Modelling上。
山东协和学院现代机械制造装备课件 主运动部件机械装调
山东协和学院 现代机械制造装备 课件 主运动部件机械装调
2020/7/10
山东协和学院现代机械制造装备课件 主运动部件机械装调。
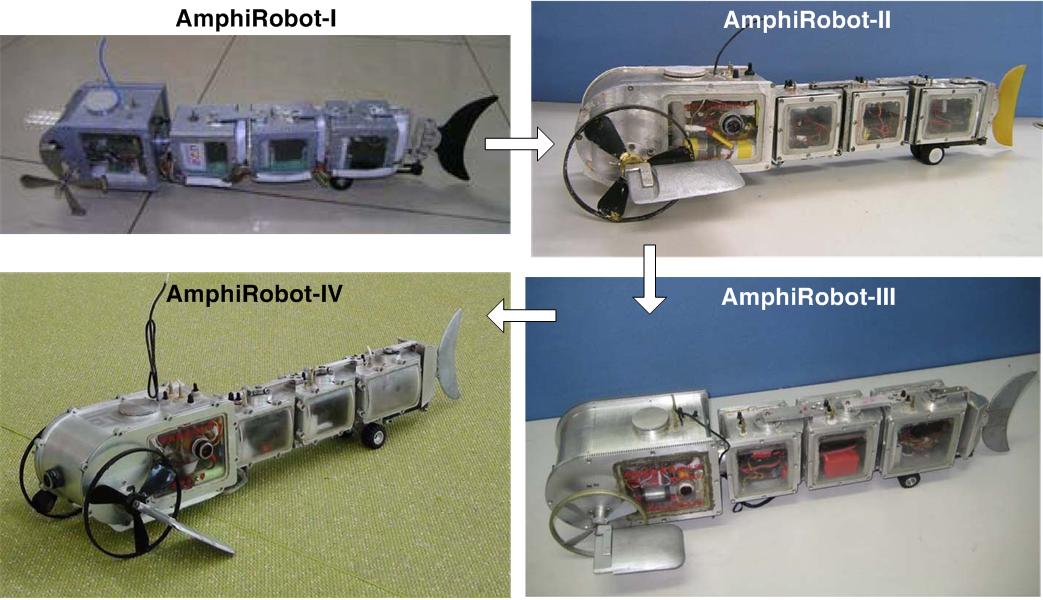
成果受到国家863项目“多模态仿生两栖机器人机构设计与运动控制 ”支持。通过机构创新和系统集成,以仿鱼推进技术为基础,辅以轮、桨、鳍一体化推进机构,研制具有快速游动性能、强大的环境感知功能及良好的水陆环境适应能力的两栖服务机器人。
当前,随着消费者可支配收入的不断提高和汽车保有量的稳步增长,必将引发新一轮消费升级,汽车改装将成为汽车消费升级的核心方向之一。除政策滞后以外,汽车改装从业人员的技术水平也是困扰并阻碍改装行业发展的一大难题,这一人才市场始终处于供小于求的局面。当前,随着消费者可支配收入的不断提高和汽车保有量的稳步增长,必将引发新一轮消费升级,汽车改装将成为汽车消费升级的核心方向之一。除政策滞后以外,汽车改装从业人员...
基于运动单元故障建模的装配可靠性控制技术
功能结构化分解 故障树分析 多色集合理论 装配可靠性
2019/3/8
为提高机电产品装配环节的可靠性,首先采用“功能―运动―动作”的结构化分解方法得到元动作单元,然后对产品历史故障数据进行分析以确定各运动单元的故障模式,并建立运动单元故障树;为提高分析效率,使用二元决策图(BDD)对故障树进行转化,得到故障树的最小割集,并根据基本事件的发生概率计算得到基本事件的重要度;然后根据80/20定律将重要度较高的事件确定为可靠性控制点,分析可靠性控制点故障的故障源,建立基于...
四足变胞爬行机器人步态规划与运动特性
四足变胞爬行机器人 腰部构态 步态规划 运动特性
2019/3/8
为解决绝大多数足式机器人的腰部是固定不可变的问题,研究一种腰部可变的四足爬行机器人,并分析腰部和腿部的形态,从数学上给出腰部构态变换的条件。另外,考虑腰部可变设计出扭腰直行步态和扭腰原地旋转步态,并将其与传统步态进行比较,分析不同步态在稳定裕度、活动空间和通过狭窄弯道等方面不同的优势。最后,研究腰部变胞使机器人在足尖活动空间、视觉观察等方面具有的特征,显示所设计的机器人对环境的适应能力。研究结果表...
面向电厂管道的攀爬机器人运动规划与仿真
管道攀爬机器人 运动规划 运动学 真分析
2019/3/8
针对电厂管道检测作业,围绕多屏平行管道环境中直管、管间和管屏间的攀爬作业需求,设计一种5自由度攀爬机器人,并进行运动规划分析。首先,分析运动需求,确定攀爬机器人的构型;其次,针对直管攀爬、管间过渡和管屏过渡的攀爬运动进行规划,提出3种步态;之后,采用基于D-H法建立的机器人运动学模型,采用逆运动学求解对应位姿点的关节角度;再通过5次多项式插值得到角度-时间序列;最后,采用ADAMS虚拟样机技术进行...
视频:新疆大学机械工程学院机械原理教学第三章 平面机构的运动分析(3)。
视频:新疆大学机械工程学院机械原理教学第三章 平面机构的运动分析(2)。