
搜索结果: 1-15 共查到“控制科学与技术 研究进展”相关记录40条 . 查询时间(1.425 秒)
智能网联电动汽车节能优化控制研究进展与展望
智能网联 电动汽车 节能 优化控制
2023/12/20
提升纯电动汽车整车能效、降低百公里耗电量,是我国新能源汽车产业发展的重大需求.智能网联背景下,V2X(Vehicle to everything)网联信息以及激光雷达、毫米波雷达、摄像头、定位及导航装置等各类车载传感器,为智能网联电动汽车(Connected automated electric vehicle,CAEV)提供了全方位的信息交互、共享和状态感知能力,赋予了其巨大的节能优化潜力。
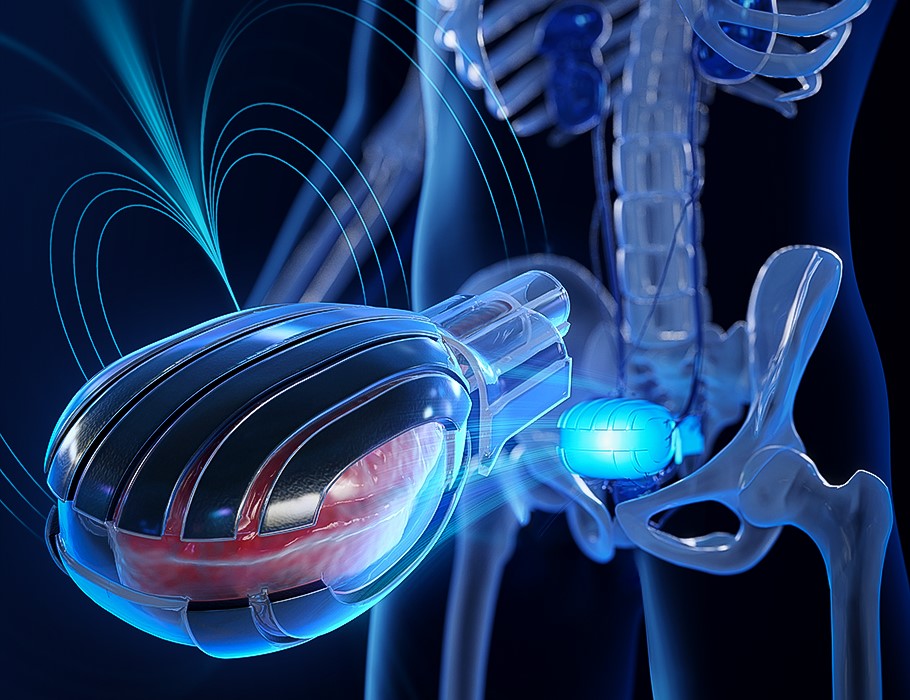
膀胱功能障碍(Underactive Bladder,UAB)是由于衰老、神经损伤、代谢综合征等原因导致的最常见的器官功能障碍之一。其临床表现为尿流缓慢、排尿困难、膀胱排空不全等,极大影响患者生活质量。严重时UAB会引起上尿路积水及肾功能衰竭等严重并发症,危及患者生命。UAB患者人群庞大,国内外多项流行病学研究证实,膀胱功能障碍的发病率约为10-23%,在70岁以上老年人群体中可高达42%-45%...

吉林大学人工智能学院助理教授宫洵以第一作者撰写的论文“Real-time Integrated Power and Thermal Management of Connected HEVs Based on Hierarchical Model Predictive Control”近日被IEEE-ASME Transactions on Mechatronics期刊接收。该期刊为中科院一区推荐期...
对于复杂、可修复的工程系统,设备维护是确保系统安全性、可靠性、可用性的重要手段之一.系统维护策略已经历修复性维护、定时维护、视情维护等多种维护策略.其中,视情维护是目前最受关注的维护策略,它通过收集和评估系统的实时状态信息进行维护决策,具有全寿命周期内系统可靠性高、运营维护成本低等优点.近年来,随着物联网技术、信息技术和人工智能的快速发展,一种更新颖的视情维护策略――预测性维护逐渐成为领域研究热点...
足式爬行机器人对复杂地形环境有着高度的适应性,在灾害救援、军事侦察、星球探索等领域具有广阔的应用前景。自足式爬行机器人发展以来,解决腿部串并联机构的强耦合性问题实现复杂环境下的稳定运动控制,是该领域研究的重点和难点。按照仿生与否分两类综述近十年国内外研制的足式爬行机器人的结构与性能特点;从灵巧机械机构创新设计、稳定性标定技术、爬行步态规划与运动控制和机器人感知技术4个方面介绍足式爬行机器人研究的关...

西北工业大学航天学院黄攀峰课题组关于多机器人协同遥操作的研究进展在INT J ROBUST NONLIN发表封面论文(图)
西北工业大学航天学院 黄攀峰 多机器人 协同作业 INT J ROBUST NONLIN 远程
2020/4/3
近日,西北工业大学航天学院黄攀峰课题组在非线性系统控制TOP期刊“International Journal of Robust and Nonlinear Control”发表封面论文“High-gain nonlinear observer-based impedance control for deformable object cooperative teleoperation with ...
从稀疏的方法和稠密的方法两个方面对基于视觉的同时定位和地图构建(VSLAM)进行综述,重点阐述各个方面的关键技术和最新的研究进展,对比分析不同方法的优缺点和实现难点.介绍了深度学习技术应用到VSLAM领域的研究进展,并讨论了二者相互促进的结合方式.最后,展望了实时VSLAM的未来研究方向.
机器人无标定视觉伺服控制研究进展
机器人 视觉伺服 无标定视觉伺服
2016/7/15
视觉伺服控制是机器人系统重要的控制手段. 相比传统的在标定条件下使用的视觉伺服系统,无标定视觉伺服系统具有更高的灵活性与适应性,是机器人伺服控制系统未来重要的发展方向和研究热点. 本文从目标函数选择、控制器设计、运动轨迹规划三方面综述了无标定视觉伺服控制系统近年来的主要研究进展. 首先根据目标函数的形式,分析了基于位置的视觉伺服、基于图像的视觉伺服以及混合视觉伺服各自的特点与应用;在控制器设计方面...
2015年9月18日获悉,中国科学院自动化研究所研发的“分子影像手术导航系统及在肝癌手术过程中高灵敏度发现微小肿瘤病灶”这一研究进展在世界分子影像大会(World Molecular Imaging Congress, 简称WMIC)上被评为大会亮点,这也是所有被选为亮点的报告中唯一来自中国大陆的研究工作。
由于对电梯的检测、维修不及时,造成电梯伤人事件频发,因此,对电梯远程监控系统进行研究显得十分必要。从电梯远程监控系统的结构、信号采集、传输通信和信号分析处理与故障诊断等方面,阐述了当前国内外电梯远程监控系统的研究现状和最新进展。最后指出了未来可以对采用WiFi技术进行通信、实现故障预警和改进电梯门控制策略这三个方面做进一步的研究。
面向目标检测的稀疏表示方法研究进展
目标检测 图像处理 稀疏表示 特征
2013/8/14
目标检测作为图像理解的一个基础而重要的课题深受国内外学者的重视,在军事和民用中具有广泛应用.应用背景的多样性和复杂性使得传统目标检测算法难以克服复杂背景、噪声干扰、光照变化以及非刚体形变、遮挡、弱特征、尺度、视角和姿态变化等因素的影响.近些年来发展起来的稀疏表示方法为图像处理及目标检测研究提供了新的思路,本文概述了稀疏表示基本概念和理论研究进展,综述了稀疏表示方法在目标特征学习、目标分类器和滤波器...
从烟幕弹结构、宽波段烟幕剂、安全环保3 个方面介绍了烟幕弹的发展概况。阐述了可在空中大面积成烟的烟幕弹、可防止错误装配的烟雾组件、带有拖曳减速装置的烟炬、可浮在水面的烟雾罐等先进烟幕弹多层次多结构的装药设计及成烟方式;介绍了宽波段烟幕剂的配方组成,安全、环保型烟雾剂的配方及其改进方法。当采用脂肪族二羧酸或芳香族二羧酸作安定剂时,可以有效防止以轻金属做可燃剂的烟雾剂在长储过程中产生氨气导致烟雾药柱强...
在探讨自动控制面临的机遇和挑战的基础上,简介智能控制的产生背景和发展过程,认为发展自动控制的一条重要出路就是实现控制系统的智能化;结合正在进行的未知环境下移动机器人导航控制研究课题,讨论了智能移动机器人研究的某些进展,涉及移动机器人控制系统的结构、环境建模、路径规划及故障诊断等;概述智能控制的研究领域,包括智能机器人规划与控制、生产过程的智能监控、自动加工系统的智能控制、智能故障检测与诊断、飞行器...
多机器人合作与协调研究进展
动态追捕 强化学习 决策系统
2009/7/23
介绍了多机器人合作与协调的国内外发展现状,重点讨论了多机器人合作与协调的研究载体――未知环境下的多机器人动态追捕问题,并针对不同的典型应用算法,作了简单的说明和比较。系统地阐明了多机器人合作与协调研究的有关方面,例如对象定义、环境探索、学习与决策、冲突消解等。在此基础上,对多机器人合作与协调的研究方向进行了展望。