
�������: 1-5 ���鵽�����ա������ѧ���� ����������ؼ�¼5�� . ��ѯʱ��(0.093 ��)
������в����ֶ��ڿռ�Ǻ���Ŀ�������������е����⣬������Ҫ������ToF��Time��of��Flight������ڿռ�Ӧ���еĿ����ԡ������ܽ��˿ռ�Ǻ���Ŀ��������������״�����в����ֶΣ���������ToF�����ԭ������չ�����ԷǺ���Ŀ���������Ϊ����������ָ����з��������Ž�ToF��������пռ������������ֶν������ܱȽϣ��������еĹؼ�������������������ToF�����δ����չ���Ƽ����ڿռ��е�Ӧ�ý���...
Ϊʵ�ֿռ�����ֱ�ӻ�ȡλ����Ϣ�ķǺ�������������Ե������ڳ�ֿ���Ŀ�����ڿռ��������ɷ� ����ǰ���£����һ�ֻ��������Ӿ��ij��������Ǻ�����������Ե������ۡ��������λ�˶���ѧģ���Ƶ���״̬ ���̣����������Ӿ�ϵͳ�ṩ�۲����ݣ��ڴ˻����������չ�������˲�����ȷ��Ŀ��������������ǵ����λ �ã�����ٶȺͽ��ٶȣ��Ӷ��Ż���������е�۲���Ŀ�꺽��������ͨ��ʵ�����з�����֤���������������÷� ��...
�����������Զ������ǵ���Ҫ�����DZ���Ŀ��λ���״��������������Զ����Ŀǰ�IJ���㷨������Զ��Ŀ����裬�ڽ���Խ�������������������㾫��Ҫ����Խ���Խ����״��������߾��Ȳ�����⣬�����һ�ֻ�����ʸ��ƥ��IJ���㷨�������˲���źſռ䴫������ģ�ͣ���������ʸ����������ʸ��ƥ��̶ȵIJ��Ŀ�꺯������������ⷽλ���븩���ǵķ����Թ滮�㷨ģ�ͣ��������㷨������������ִ�в��衣������...
����������������˶��ǵ�ǰ�����������Ҫ�о��ȵ㡣���Բ(��Բ)���Ŀ�꺽�������ۺ�����C\|W���̡�������ƺ��Ż����ۣ�ϵͳ�ؽ���˺���������˶��Ĺ켣�����������⡣��C\|W���̽������������������Ȼ�켣�����켣����ѧ�������Դ�Ϊ������������ײ���⣬�о���ȫ���Ʒɹ켣�;ֲ����ƹ켣���������ơ�����ȫ���Ʒɹ켣���о��������Ȼ��Բ�Ʒɡ���Ȼ�����Ʒɡ������塰ˮ�Ρ����Ʒɡ�������Բ���ƷɺͶ�...
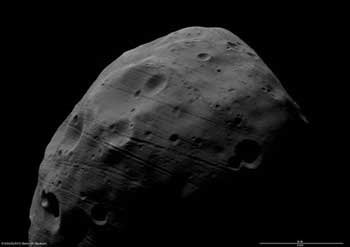
�ۺ�ý�屨����ŷ�����2008��7��30���������û����ġ����ǿ쳵��̽�����ڱ���23���Բ���100��������������һ���棬��������Ż������ǵ�������Ƭ��
ŷ���ֳƣ������ǿ쳵��̽�����ڸ�������ʱ��23���賿��ÿ��3������ٶȴӻ���һ�����ɹ������ߵ���������һ��ֻ��93�����Ԥ�Ƶ�97�����Ϊ�ӽ�����ǰ�������ǿ쳵����ȻҲ���ӻ���һ�Ա߷ɹ���������֮���������δ����100����ڸ�̽����...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...