
搜索结果: 16-30 共查到“知识库 工业机器人技术”相关记录112条 . 查询时间(5.206 秒)
江南大学机械工程学院机器人工程专业介绍
江南大学 机器人工程 专业介绍
2022/6/2
机器人工程专业是江南大学面向新产业革命和新经济发展设立的“新工科”专业,整合了江南大学机械工程、控制科学与工程、计算机科学等多学科优势资源,依托江南大学机械工程学院、君远学院开展专业建设与教学,以实践创新为特色,具有很强的前沿性、综合性和实践性,是培育机器人研发设计与集成应用高级人才的理想摇篮!机器人工程专业以机械工程、控制科学与工程、计算机科学与技术、人工智能、材料科学与工程等学科中涉及的机器人...

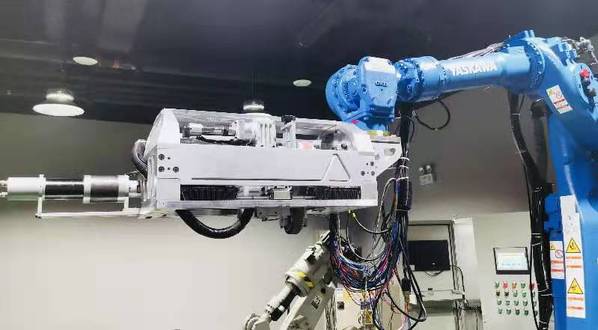
机器人磨抛作业属于连续接触式加工,在磨抛过程中不仅要对机器人进行精确的位置控制,还要进行接触力控制,以提高加工精度。目前工业机器人进行力控制的方法主要有两种,即通过控制机器人关节力矩的直接力控法和利用机器人外部附加装置的间接力控法。前者需要建立准确的机器人动力学模型,并且机器人的大惯性会影响力控的动态响应速度和精度。后者可通过增加一个具有力控制功能的末端执行装置,与机器人通过宏微协调实现精准的力控...
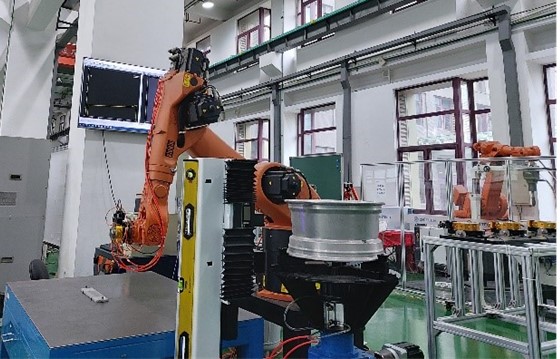
实验室针对金属零件表面强化、残余应力消除及曲面成形校形等工程问题,与超声团队合作,在研制超声波校形装置的基础上,结合先进机器人布局优化、运动学标定等技术开发了机器人化超声喷丸校形系统,填补国内超声波冲击处理智能化装备空白,为航空航天、汽车工业、精密模具等领域关键零部件高效高质量加工提供技术支撑。项目突破了以下关键技术:
机器人化超声喷丸校形系统布局优化:通过建立KUKA KR60-3机器人的运动...

并联机器人具有运动部件质量小、定位精度高、结构刚度大等优点,广泛应用于电子制造、食品加工、物流仓储等领域。现有四自由度并联机器人,仍存在着工作空间小、高速运动下定位精度低、机器人操作复杂等缺点,限制了在高端制造业中的推广应用。团队在并联机器人构型设计、误差补偿、控制策略开展了系统性研究,设计了一种新型高速高精四自由度并联机器人,并开发了集成视觉定位模块的并联机器人控制系统,可有效解决3C装配、上下...

东华大学机械工程学院智能机械与机构创新设计团队学科方向:高端与特种纺织装备及系统。研究内容:机构创新设计及应用研究、精密机电传动与系统及其在高端纺织装备上的应用、精密齿轮传动及其在机器人关节领域的应用研究、微型齿轮传动、水下/水面仿生机器鱼动力传动系统,CAD软件开发与应用、图像识别与三维重构、工程规划设计与仿真,智能材料超精密驱动系统及动力学设计,振动噪声控制。
《机械工程学报》投稿须知
《机械工程学报》 投稿须知
2022/3/1
《机械工程学报》于1953年创刊,由中国科学技术协会主管、中国机械工程学会主办,是中国机械工程领域的顶级学术刊物,主要报道机械工程领域及其交叉学科具有创新性的基础理论研究、工程技术应用的优秀科研成果。本刊为半月刊,每月5日和20日出版;被Ei、CA、SA、AJ、中国期刊网全文数据库等国内外多家知名检索系统收录。


高精度多自由度钢管焊缝磨削机器人实现大型钢管(直径0.5-2.5m)内外壁螺旋焊缝修磨技术,通过解决磨削振动和多自由度冗繁控制的难题,突破了大型油气运输管道管端修磨繁琐、耗时的弊端,打破国外相关设备的技术垄断。

全地形六足爬行机器人(图)
全地形六足爬行机器人 朱雅光 机器人
2021/4/23
全地形六足爬行机器人是由朱雅光教授团队自主研发,整机具备24个关节,通过神经控制架构实现灵活、敏捷的运动行为。通过人机协同、自主避障和自主导航与定位构图等功能,用以完成检测、探索和救援任务。

SmartQuad四足机器人(图)
SmartQuad 四足机器人 感知设备 机器人
2021/4/23
SmartQuad是由工程机器人与无人装备协同技术研究团队自主研发的一款四足自主巡检机器人,身长0.9m、宽0.5m、高0.6m,体重50Kg,并配有视觉、激光雷达、IMU、足力传感器等感知设备,具备面对复杂地形的高通过性、高灵活性和高协调性。
成都工业学院智能制造学院机器人工程专业介绍
成都工业学院智能制造学院 机器人工程
2021/4/10
机器人工程专业是顺应国家智能制造发展战略和机器人科技发展趋势而设立的专业,是融合机械工程、控制科学与工程、计算机科学与技术等多学科知识的新工科专业,国家出台了大量支持机器人人工智能的发展政策,机器人也是四川省“5+1”产业发展规划重点推动的核心领域之一,具有很好的发展前景。本专业具有良好的实验实践条件,与富士康联合建有全国一流的智能制造实践教学平台-成工富创,拥有ABB双臂机器人、UR机器人、工业...
成都工业学院智能制造学院智能制造工程专业介绍
成都工业学院智能制造学院 智能制造工程 专业介绍
2021/4/10
智能制造是我国“制造强国战略”的核心单元,是“中国制造2025”的主攻方向、也是四川省“5+1”产业发展战略的重要组成部分,急需大量智能制造工程专业的技术和管理人才,服务四川乃至全国智能制造行业和产业的发展。本专业是教育部重点打造的“新工科”专业,涉及机械工程、控制科学与工程、计算机科学与技术等多个学科,涵盖智能装备、工业机器人、生产管理等关键技术。本专业拥有国内一流的智能制造实践培养基地、智能制...

长安大学工程机械学院工程机器人与无人装备协同技术研究团队(图)
长安大学 工程机器人 无人装备 智能化
2021/3/31
顺应人工智能和重大装备的国家战略发展需求、工程装备自主无人智能技术的发展方向,将现有优势与前沿科学结合能够进一步提升科研和技术攻关能力。本团队围绕机器人工程应用研究,以实现工程装备无人化和全面自主化为目标,开展工程装备智能化、无人化、机器人化与无人装备协同技术等理论与关键技术研究,形成具有国际影响力的标志性成果,同时带动区域内经济和技术发展。