
搜索结果: 1-8 共查到“机械制造自动化 移动机器人”相关记录8条 . 查询时间(0.195 秒)
近日,由国际电气电子工程师协会(IEEE)主办,爱丁堡大学承办的IEEE软体机器人国际会议(IEEE INTERNATIONAL CONFERENCE ON SOFT ROBOTICS, RoboSoft 2022)的软体机器人比赛在线上线下混合举行,南科大学子组队参加移动机器人项目并获冠军。
2021年5月21日,第三届中国西部国际投资贸易洽谈会(西洽会)开幕,参与的跨国企业达上千家。在西洽会上,先进制造工程学院张毅教授带领的机器人研发团队研发的智能移动机器人亮相并受到广泛关注。

2020年12月29日,2020好设计颁奖大会暨中国创新设计大会在浙江建德举办,中国科学院宁波材料技术与工程研究所“智能全向移动机器人”项目荣获“好设计”金奖。宁波材料所副所长杨桂林代表获奖团队参加了颁奖仪式。“智能全向移动机器人”项目由精密运动与先进机器人技术团队设计开发,其采用自主研发的解耦式主动万向脚轮克服了传统全向移动机器人存在机动灵活性差、驱动效率低、对地面损伤大、噪音高、运动控制精度低...
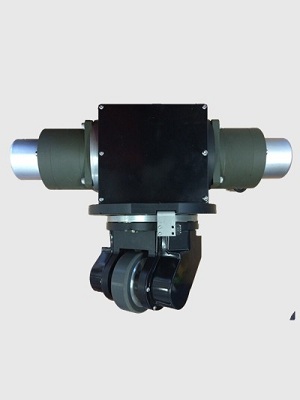
宁波材料所成功研发用于车间物流的“全向移动机器人”系统(图)
宁波材料所 研发用于车间物流 全向移动机器人 系统
2017/4/5
智能移动机器人是现代化车间物流系统的核心装备,拥有巨大的市场空间。然而现有的移动机器人存在着机动灵活性差与定位导航精度低等问题,制约了移动机器人的发展。宁波材料所所属二级所先进制造所得精密运动与先进机器人团队针对上述问题开展了深入的研究,近期开发出一套基于全向移动机器人的自动化车间物流系统,并成功应用于某大型国产汽车公司的发动机生产线搬运环节。
针对移动机器人现有路径规划方法存在易产生局部最优解的问题,提出了一种基于人工免疫势场算法的移动机器人路径规划。该算法与机器人的动态特性相结合,采用栅格编码方式,并在人工免疫的基础上引入人工势场法中的势场函数,改进了人工免疫算法中初始种群的随机性;将初始种群通过交叉、变异和选择算子进行免疫进化操作,能很快产生较优抗体,提高移动机器人在路径规划方面的效率。仿真对比试验表明,采用该算法在得到最优路径的同...
环境特征提取在移动机器人导航中的应用
激光雷达 特征提取 移动机器人
2008/1/11
摘要针对移动机器人在未知结构化环境中导航的需要,采用2D激光雷达作为主要传感器,对诸如墙壁、拐角、出口等这些典型的环境特征分别设计了一套有效地特征提取的算法,并在该算法的基础上提出了基于特征点的移动机器人导航策略。该策略不需要里程计等其它一些内部传感器的信息,并且也不依赖具体的环境表述模型,从激光雷达扫描一次所得的数据中即可提取出环境特征,从而来指引机器人导航,实现起来快速可靠。应用到移动机器人M...
全自主移动机器人在未知环境中的运动规划
2007/7/28
期刊信息
篇名
全自主移动机器人在未知环境中的运动规划
语种
中文
撰写或编译
撰写
作者
李杰,熊蓉
第一作者单位
浙江大学工业控制技术国家重点实验室
刊物名称
电气自动化
页面
27(5): 34-37
出版日期
2005年
月
日
文章标识(ISSN)
相关项目
多移动机器人协作的环境建模