
搜索结果: 1-15 共查到“光学工程 无人机”相关记录22条 . 查询时间(0.411 秒)
流域水环境综合治理的内部潜力要释放!利好企业的大环境下,道路其实并不平坦,企业发展得找准关键。可以看到流域治理的重要性凸显、关注度提升,流域水环境治理力度不出意外是要再加强的。污染防治攻坚战转深入,流域水环境综合治理自然也在其中。进入2022,一份“十四五”期间流域治理的重要文件就率先亮相了――《“十四五”重点流域水环境综合治理规划》。
“十四五”流域治理规划发布 无人机搭载高光谱成像仪来巡逻
流域治理 水环境保护 水生态治理 机载高光谱成像仪
2022/1/26
流域水环境综合治理的内部潜力要释放!利好企业的大环境下,道路其实并不平坦,企业发展得找准关键。可以看到流域治理的重要性凸显、关注度提升,流域水环境治理力度不出意外是要再加强的。污染防治攻坚战转深入,流域水环境综合治理自然也在其中。进入2022,一份“十四五”期间流域治理的重要文件就率先亮相了――《“十四五”重点流域水环境综合治理规划》。
“十四五”流域治理规划发布 无人机搭载高光谱成像仪来巡逻
十四五 流域治理 无人机 高光谱成像仪
2022/1/25
导读:流域水环境综合治理的内部潜力要释放!利好企业的大环境下,道路其实并不平坦,企业发展得找准关键。可以看到流域治理的重要性凸显、关注度提升,流域水环境治理力度不出意外是要再加强的。污染防治攻坚战转深入,流域水环境综合治理自然也在其中。进入2022,一份“十四五”期间流域治理的重要文件就率先亮相了――《“十四五”重点流域水环境综合治理规划》。
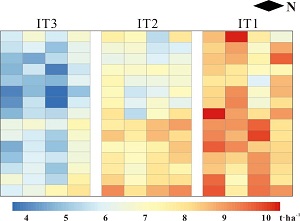
2022年1月21日,中国农业科学院农田灌溉研究所节水高效灌溉技术与装备创新团队,采用特征选择方法对水分胁迫冬小麦无人机高光谱影像指数进行筛选,开发了一个决策层融合集成机器学习模型,探索了使用无人机高光谱影像建立冬小麦产量估算模型的有效性,为农业生产精准灌溉管理提供科学依据。相关研究成果在线发表于《Agronomy》(《农学》)。
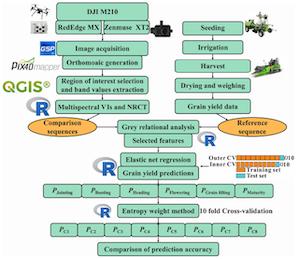
中国农业科学院农田灌溉研究所“节水高效灌溉技术与装备创新团队”,利用基于无人机高通量作物表型观测平台采集多光谱和热红外图像,结合弹性网络回归算法和熵权集成算法对水胁迫条件下冬小麦产量进行预测,为精准监测水分亏缺条件下小麦长势和精准灌溉管理提供依据,相关研究成果在线发表于《Frontiers in plant science》(https://doi.org/10.3389/fpls.2021.73...
提出了一种基于缓冲区状态及梯度算子的低延时高效视频码(HEVC)率控制方法,以解决现有的码率控制算法在无人机机载侦察系统中因比特分配不当引起的视频质量较差的问题。首先,利用剩余比特及缓冲区状态预分配帧层目标比特;然后,以视频中每帧各最大编码单元(LCU)的时空复杂度作为权重,预分配各LCU的目标比特;最后,通过R-λ模型获得目标比特下的编码参数,实现视频压缩编码,并完成模型参数更新。实验结果表明:...
为保证无人机着陆精度和安全性,提出了一种无人机自主着陆视觉导航位姿解算方法。首先对机载相机进行标定,获取相机参数;然后综合考虑地标形状和尺寸、地标角点几何分布和角点数量对位姿估计精度的影响,设计了“T”型着陆地标形状和尺寸参数,将地标轮廓提取和角点检测算法相结合,得到几何分布好、数量适中的8个角点用于位姿解算,保证了位姿解算精度;为减少LK (Lucas-Kanade)光流法稳定跟踪地标的处理时间...
激光供能无人机光伏接收器效率优化方法
效率优化 光伏接收器 不均匀光照 电路连接
2015/7/9
激光供能无人机(LPUAV)通过激光无线能量传输进行实时能量补给,大幅提升无人机续航时间。但激光束能量分布不均匀,导致光伏接收器效率低下。通过推导串并联光伏组件在不均匀光照条件下的输出方程,针对I-V、P-V曲线、光伏电池效率及组件整体效率进行对比研究,着重分析了串并联组件效率与光照不均匀度的关系及内在机理。研究表明,并联旁路二极管的串联组件在不均匀光照下存在多峰现象,且光伏电池易受影响而偏离最大...
面向无人直升机的低空飞行、着陆和悬停,提出了一种用于无人机地面站的三维场景增强感知方法。针对复杂的低空环境,为三维场景的地形数据构建了多层次调用准则,以此增加三维场景的局部细节。然后,为障碍物数据库中的障碍物设计了三维保形符号,实现了对障碍物的增强感知;引入动态感知思想,设计了垂直剖面显示、路径指示以及能够实时提示飞行安全的保护符。最后,提出增强合成视景,实现了三维场景增强感知系统。选择低空进场和...
针对无人机影像数量多、畸变大,在影像拼接过程中会产生大量累积误差的问题,对如何减少拼接过程中的误差累积进行了研究。首先,根据记录影像匹配过程中心点位置计算大致的匹配区域以减少匹配时间。接着,进行区域网概算,列出误差方程,并对不同地形特征区域赋予权值进行分区域加权平差。最后,利用无人机影像分别对本文方法和传统的直接拼接法进行实验。实验结果表明:本文提出的方法可使鬼影和错位现象减少12%,拼接效率提高...
针对高速无人机光电侦查平台的实时对地目标定位误差,研究了基于惯导信息的光电平台目标定位算法。利用目标定位数学模型和误差模型,分析了影响目标定位精度的因素,建立了参数误差对于定位精度影响的数学仿真模型。通过仿真分析确定了卫星导航信息的实时性是造成定位误差的主要因素,提出了通过修正卫星导航信息延时时间来解决了光电侦察平台实时目标定位误差问题。进行了飞行试验以验证提出论点的正确性,结果表明:通过修正卫星...
自适应串级自抗扰弹性飞翼无人机姿态控制
串级自抗扰 弹性飞翼无人机 宽包线控制 刚弹耦合
2013/9/5
文中针对飞翼无人机因其宽泛的飞行包线和特殊的布局带来的飞行控制技术难点,给出了一种自适应串级自抗扰飞翼无人机宽包线控制算法。首先,推导了适用于该算法的弹性飞翼无人机的非线性数学模型;其次,分别设计了弹性飞翼无人机的内环和外环自抗扰姿态控制器。自适应自抗扰控制器利用扩张状态观测器进行估计并动态反馈补偿,再利用NLSEF 抑制补偿残差;不需要无人机精确的模型参数,也无需精确的气动参数及摄动界限。仿真分...
无人机地面目标实时自主视觉定位
微小型无人机 数字高程模型 机器视觉 目标定位
2013/6/10
微小型无人机携带设备受到重量限制,基于摄像机透视投影原理的坐标解算模型,重点研究基于数字高程模型的测高逼近算法,获取无人机距离地面目标之间的高度差,以满足微小型无人机机载设备实时自主定位地面目标的要求。计算机仿真实验结果,以及完成算法硬件平台移植后进行的无人机实飞测试实验结果均可以看出,采用的解算模型结合基于数字高程模型的测高逼近算法可以满足对25帧/s视频流的地面目标实时自主定位,并具有较高的精...
无人机蒙皮红外辐射特征研究
飞翼布局无人机 数值模拟 红外辐射 红外隐身
2013/3/1
以典型飞翼布局无人机为研究对象,采用流场计算商业软件和自主开发红外计算软件相结合的形式,利用离散传递法计算了全机在8~14 μm波段红外辐射强度分布。在红外计算过程中,考虑了发动机固体壁面的发射和反射,飞机蒙皮的发射,燃气内CO2、H2O和CO吸收与发射作用。结果表明:马赫数是影响其8~14 μm波段红外辐射特征的重要因素之一;通过冷却、隔热等措施降低后机身发动机热影响区蒙皮的温度或者在机身蒙皮上...