
�������: 1-10 ���鵽����ҵ�����˼��� �������������ؼ�¼10�� . ��ѯʱ��(0.201 ��)

�ڰ˽������������ᡪ������������ؼ��������������������������ƾ������Ϸ��Ƽ���ѧ�ٰ죨ͼ��
��������� �Ϸ��Ƽ���ѧ
2023/11/29
2023��11��24-26�գ��ڰ˽������������ᡪ������������ؼ��������������������������ƾ������Ϸ��Ƽ���ѧ���С���������ѧ��У�����������ڣ����������ѧЭ����У�����꿪���ڣ���������ɽ���˲ž־ֳ�֣�������������Э�ḱ���鳤̷ά�ѣ��������˲�ר�����ϻḱ�᳤����������ҵ������ҵ��������첩ʿ��ʷ����ʿ����������ʿ��ר��ѧ�ߣ���У���Ժϵ�����˼�����ȫ��30������У����е�λ��300��λר...

�����ڼ��μ�����������������ơ���ģ�Ϳ��ơ�������̳���У�ͼ��
���μ��� ��������� ��� ��ģ ���� ������̳
2023/10/23
2023��10��20�����磬������Ĵ�ѧ��е�������Զ�������ϵ�������ڷ����ν������ͻ���ũҵ��ѧ��ѧԺ������̳���ԡ����ڼ��μ�����������������ơ���ģ�Ϳ��ơ�Ϊ�����ڹ���¥A111�����������ʦ�����н����������ɻ���ũҵ��ѧ��ѧԺ��ҫ����ʦ���֡�

�Ϸ��Ƽ���ѧ��е����Դ����ϵ����ǿ���������ŶӺ������������������ȡ���½�չ��ͼ��
����ǿ ������ ��������� Advanced Intelligent Systems
2023/3/27
���գ��Ϸ��Ƽ���ѧ��е����Դ����ϵ����������ǿ�ŶӺʹ�����Ժʿ�ŶӺ�������������������ڿ�Advanced Intelligent Systems�Ϸ�����һƪ���ڸ������Ընȷ���������������о����ģ����ı���Ϊ ��Soft Robots for Cluttered Environments Based on Origami Anisotropic Stiffness Structure (OASS...
���գ��ɹ��ʵ������ӹ���ʦЭ�ᣨIEEE�����죬��������ѧ�а��IEEE������������ʻ��飨IEEE INTERNATIONAL CONFERENCE ON SOFT ROBOTICS, RoboSoft 2022��������������������������»�Ͼ��У��Ͽƴ�ѧ����Ӳμ��ƶ���������Ŀ����ھ���

�й���ѧ������ѧ��Сƽ�����Ŷ��ܷ䳲����ǡ���������������÷䳲��������ṹ�Ʊ���һ�������һ��������Ⱥʹ�������������������ֱۣ�����������������еĿ��š�šƿ�ǡ�������ȸ���������سɹ���ǰ�����ڡ������������о���־����
�й���ѧԺ�������ϼ����빤���о������������������ɱ�̵ġ�����Ĥ�������������ͼ��
�й���ѧԺ�������ϼ����빤���о��� ������ �ɱ�� ����Ĥ ��������� �����
2020/9/2
�����ϵĴ���������徭�����ڽ���ѡ��ɸ�����������绷�����ٲ�����Ӧ�������α��/��ɿ��˶��Զ��Σ�ա����深�ܡ����磬��Ȼ���е�ֲ��������������ɺ����������������֩���ڶ�����Ϯ��������£���ѡ���Ե��Ƚ���������Ϊ��״������ͨ�����������˶�����ʽ�����뿪��ǰ����������ͨ���˹��ϳɲ��ϵij��ɿ���ơ�ģ��������Խ�����������������Ϊ���Ƿ������������о���ǰ���ȵ㼰�ѵ�֮һ�������������Ͽɽ���...
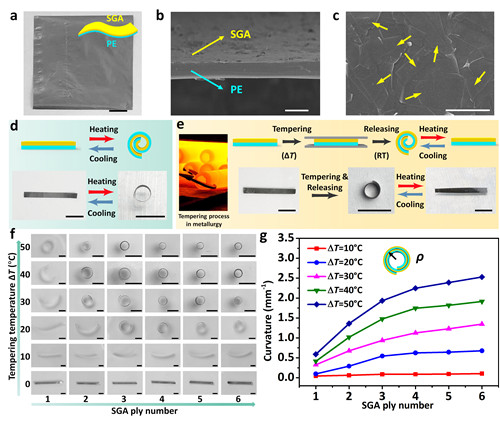
2���׳���0.3���ء�������������С���������ָ��ȥ�Ķ������¶��¡����������������Ϻ��������գ��人��ѧ��ҵ��ѧ�о�ԺѦ�������ڿ��������Ƴ�һ�ֿɾ����Ʒ�����ٶȡ��ۺ����ܼ��ѵ����������������Ԥ�ڿ��ڷ������졢����������ɸ��ָ�����ҵ��
2���׳���0.3���ء�������������С���������ָ��ȥ�Ķ������¶��¡����������������Ϻ��������գ��人��ѧ��ҵ��ѧ�о�ԺѦ�������ڿ��������Ƴ�һ�ֿɾ����Ʒ�����ٶȡ��ۺ����ܼ��ѵ����������������Ԥ�ڿ��ڷ������졢����������ɸ��ָ�����ҵ��

�й���ѧԺ�����Ƚ������о�Ժ�з��������������Ķ���������������ͼ��
�й���ѧԺ�����Ƚ������о�Ժ ���� ��� �� ���������
2020/1/9
���գ��й���ѧԺ�����Ƚ������о�Ժҽ�����������о����Ķ�ѧ���о��Ŷ������ܷ���������������������о��ŶӺ������з��������������Ķ������������������ɶ�ģ̬�˶����ɿر��Ρ���ѧαװ�����ӻ���֪�����ȹ�����һ�壬��������������������ڸ�������ռ����˶���ִ�ж���������������о��ɹ���"Reconfiguration, Camouflage and Color-shifting for Bioi...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...