
搜索结果: 1-15 共查到“锚”相关记录64条 . 查询时间(0.106 秒)

中国科学院单原子催化剂锚定机制研究获进展(图)
单原子催化剂 金属 纳米材料
2024/4/9
氧化物负载的贵金属催化剂是多相催化剂中被广泛应用的催化剂。金属与载体之间的强相互作用以及载体表面缺陷通常被认为是贵金属原子锚定在可还原氧化物(TiO2、CeO2)载体表面的关键因素。中国科学院城市环境研究所贺泓院士团队,联合昆明理工大学宁平与李凯团队、香港城市大学曾晓成团队、美国宾夕法尼亚大学Joseph S. Francisco团队,提出了全新的贵金属单原子在可还原氧化物载体上的锚定机制。该机制...
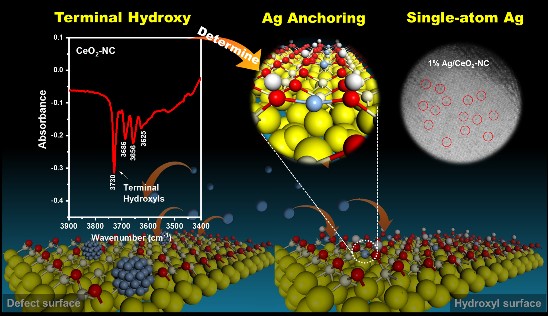
氧化物负载的贵金属催化剂是多相催化剂中最为普遍且被广泛应用的催化剂,在工业生产中占有举足轻重的地位。金属与载体之间的强相互作用(SMSI)以及载体表面缺陷(空位、台阶等)通常被认为是贵金属原子锚定在可还原氧化物(TiO2、CeO2)载体表面的关键因素。贺泓院士团队与昆明理工大学宁平-李凯教授团队、香港城市大学曾晓成教授团队、宾夕法尼亚大学Joseph S. Francisco教授团队合作研究,提出...
中国科学院金属研究所专利:一种钢绞线锚头防腐套管
中国科学院金属研究所 专利 钢绞线锚头 防腐套管
2023/11/24
一种钢绞线锚头防腐套管,其特征在于:包含有套管体1、支撑架2; 其中支撑架2安装在套管体1内部;套管体1采用如下三种结构之一:普 通套管、变径套管、变径组合套管,并且套管上开设排气孔或灌注孔8。变 径组合套管为两半径不同的圆筒形组合结构,且套管管体分为上管壁3、下 管壁4;上管壁3与下管壁4可采用如下两种结构形式相接: 一.上管壁3、下管壁4都别一端开圆柱形凹槽5,另一端为圆柱凸槽 6结构,上管壁...
针对交会对接多任务自主决策问题,介绍基于锚点的智能交会策略,以及多约束下的轨迹规划和控制问题。
基于改进扩展状态观测器的液压锚杆钻机滑模摆角控制
液压锚杆钻机 滑模控制 扩展状态观测器 自适应律
2023/6/20
液压锚杆钻机摆角系统固有的死区、干扰和时变参数严重影响其动态和稳态性能.为解决该问题,通过融合动态面方法、滑模方法和扩展状态观测器,提出一种基于改进非线性扩展状态观测器的液压锚杆钻机自适应滑模摆角控制方法.首先,引入一种死区补偿方法,建立摆角系统的死区补偿模型.其次,为提高系统的抗扰动能力和抑制噪声,设计一种改进的非线性扩展状态观测器.此外,构造一种自适应滑模控制律,这其中,基于性能函数和动态面方...

太阳能驱动水分解是生产清洁可再生氢能的潜在长期战略。自从发现TiO2的光催化性能以来,由于其优异的稳定性和无毒性,成为研究最广泛的光催化剂之一。众所周知,驱动光催化反应需要三个主要步骤,即光激发、电荷分离和迁移以及表面反应。研究人员通过掺杂和构建缺陷将TiO2的光响应扩展到可见光区,通过构建异质结改善光生电荷和空穴的分离,通过加载助催化剂促进表面反应,任一单独的性能优化步骤中都取得了巨大的进展。但...

锚定航向再出发 逆风扬帆开新局――第十八届中国铸造协会年会圆满落幕(图)
中国铸造协会 第十八届 年会
2022/10/2
2022年9月18-21日,第十八届中国铸造协会年会在上海富悦大酒店圆满举办,本届年会以“强基补链、智造创新、协同发展”为主题,期间安排了精彩的多场专家报告、企业家对话以及多场技术专题分论坛;众多行业及上下游企业代表齐聚上海,热议行业热点话题,共有来自全国各地的近800位企业代表参加了会议。

单原子催化剂因其具有丰富的活性位点和超高的原子利用率获得了广泛研究。然而,利用现有报道的原子层沉积、浸渍吸附和光沉积等策略合成的单原子催化剂,存在金属原子分散性差、金属与载体之间的相互作用弱等问题,限制了单原子催化剂的氧还原催化性能。

中国科学院青岛能源所开发隔离锚定策略原位合成铁单原子催化剂(图)
原位合成 原子催化剂 浸渍吸附 光沉积
2022/8/25
单原子催化剂因其具有丰富的活性位点和超高的原子利用率获得了广泛的研究。然而,利用现有报道的原子层沉积、浸渍吸附和光沉积等策略合成的单原子催化剂,存在金属原子分散性差、金属与载体之间的相互作用弱等问题,从而限制了单原子催化剂的氧还原催化性能。

近日,重庆鑫业船舶件有限公司为马士基航运有限公司2200TEU集装箱船首制船H2649制造的7875kg DZ-14大抓力锚的现场检验顺利完成并通过验收。马士基航运有限公司2200TEU集装箱船项目首制船H2640的船舶配套的大抓力锚产品由中国船级社(CCS)重庆分社执行产品检验。为确保产品质量,重庆分社验船师在与重庆鑫业船舶件有限公司联系沟通后,梳理各个重要工序节点,确认批准图纸及工艺有效性,同...

2019年10月24日上午,由重庆市住房和城乡建设委员会在重庆交通大学第一教学楼一楼重庆交大建设工程质量检测中心主持召开了“桥梁结构锚下有效预应力控制技术应用与沿程预应力监测技术研究”鉴定会,该课题由重庆交通大学研究生预应力测控技术学科团队承担。本次会议共邀请了六位专家到场验收评审,专家组组长由中交一公局总工田克平担任,组员有重庆大学教授李唐宁、重庆市建设工程质量监督站副站长关志鹏、重庆高速工程顾...
基于定位误差估计的锚节点布局优化
锚节点布局 布局优化 多边测量定位 误差上限估计
2018/9/20
大多数现有研究忽略了室内定位系统的最佳锚节点布局问题,传统多边测量定位算法误差分析中,存在误差面积不规则、计算困难等问题,作者提出了一种实现最小定位误差的锚节点布局方法。使用几何分析和实验分析相组合的方法研究定位误差和锚节点布局之间的关系,通过几何面积关系精确计算了双锚节点定位误差,提出了一种新的误差上限估计方法,这一误差上限反映了锚节点的位置和锚节点处的误差,可以用于比较任意两个锚节点布局之间的...
面向WSN的移动锚节点路径规划算法
无线传感器网络 宽度优先搜索算法 蚁群算法
2018/1/23
针对无线传感器网络中使用移动锚节点辅助未知节点定位问题,提出了一种动态路径规划算法.该算法首先引用相关图论知识,把无线传感器网络看成一个连通的无向图,将传感器节点转化为图的顶点选取虚拟信标节点,通过蚁群算法遍历所选取的节点获得移动路径.并对传统宽度优先搜索算法中节点选取冗余和经典蚁群算法中存在的收敛速度慢等问题提出改进.仿真实验结果表明,改进算法能在保证一定通信覆盖率的情况下减少节点重复遍历以及锚...
一种具有阶段优势的无锚点定位算法
无线传感器网络 无锚点定位算法 质点弹簧模型
2016/1/4
经典无锚点定位算法存在定位误差大和节点坐标易陷入局部最优的问题.本文提出一种包含两个阶段的无锚点定位算法:第一阶段采用跳数量化方法将节点的通信半径长度量化为多跳,从而建立更小误差的坐标系;第二阶段采用自适应质点弹簧优化算法优化节点的坐标,防止节点坐标在迭代优化时陷入局部最优.仿真结果表明,本文的算法具有阶段优势,比传统算法定位精度高,收敛速度快.