
搜索结果: 1-15 共查到“机器人控制 控制方法”相关记录58条 . 查询时间(1.273 秒)
中国科学院沈阳自动化研究所专利:一种可旋转舵推进器的水下机器人控制方法
中国科学院深圳先进技术研究院专利:手术机器人的控制方法和系统
中国科学院深圳先进技术研究院 专利 手术机器人 控制方法
2023/11/22
中国科学院深圳先进技术研究院专利:手术机器人的控制方法和系统
中国科学院合肥物质科学研究院专利:连续型机器人的光纤形状估测反馈控制方法
中国科学院合肥物质科学研究院专利:一种基于嵌入式控制器的机器人控制方法和装置
中国科学院合肥物质科学研究院专利:一种机器人的控制方法以及装置与系统
中国科学院深圳先进技术研究院专利:一种用于手术磨削的机器人的控制方法和装置
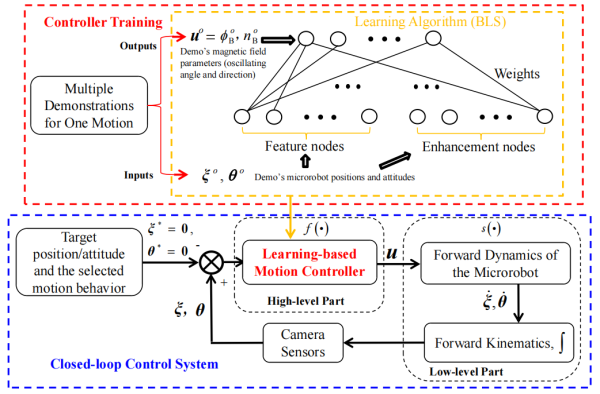
近日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Method Using ...

中国科学院深圳先进院提出针对微型仿鱼磁驱动机器人的复杂运动学习控制方法(图)
微型仿鱼 磁驱动机器
2023/5/18
2023年5月18日,中国科学院深圳先进技术研究院副研究员徐升和研究员徐天添团队合作,提出了一套针对微型仿鱼磁驱动机器人的复杂运动学习控制方法,通过宽度学习网络训练获得了可控磁场变化与仿鱼机器人多种动作基元之间的关系规律,实现了仿鱼机器人的复杂运动,而且该方法无需复杂调参,并具有优异鲁棒稳定性,保障了运动过程不受外界扰动影响。相关研究成果以A Robot Motion Learning Metho...
基于深度强化学习的双足机器人斜坡步态控制方法
准被动双足机器人 深度强化学习 步态控制 步行稳定性
2021/8/20
为提高准被动双足机器人斜坡步行稳定性,本文提出了一种基于深度强化学习的准被动双足机器人步态控制方法.通过分析准被动双足机器人的混合动力学模型与稳定行走过程,建立了状态空间、动作空间、episode过程与奖励函数.在利用基于DDPG改进的Ape-X DPG算法持续学习后,准被动双足机器人能在较大斜坡范围内实现稳定行走.仿真实验表明,Ape-X DPG无论是学习能力还是收敛速度均优于基于PER的DDP...
基于实时优化遗传算法的磨削机器人阻抗控制方法研究
机械臂力控制 磨削机器人 模型预测控制
2019/3/15
针对机械臂与环境接触时恒力跟踪动态响应速度慢的问题,提出了基于实时优化遗传算法的阻抗控制方法。在研究过程中,依据机械臂恒力跟踪的响应速度和控制精度的综合性能指标,改进了离线优化中遗传算法的交叉、变异和计算适应度值等操作算子的处理方式,实现了阻抗控制方法中的控制参数的实时优化。仿真结果表明:与传统控制方法相比,该方法可以在保证控制精度的前提下,提高了机械臂与环境接触力的动态响应速度,降低了控制过程超...
基于连续体模型合理简化蛇形机器人的动力学方程,基于该动力学描述获得无侧滑条件下使机器人质心速度稳定的关节角度参数集.然后,通过分析侧滑概率与控制参数之间的关系,获得法向摩擦力有限时使质心速度稳定的控制参数.在实现质心速度稳定的基础上,基于连续体模型获得无侧滑时实现机器人速度跟踪的控制参数.最后基于上述理论值设计控制器,将上述理论值作为关节角度参数的初值,利用速度反馈对关节角度进行微调节,消除模型近...
为了实现抛磨系统机器人末端的位置控制和接触力控制,提出一种基于被动柔顺装置的机器人抛磨系统力/位混合控制策略.在机器人末端安装一个柔顺装置实现对工具末端力控制和位置控制的解耦.柔顺装置一端安装于机器人末端,另一端连接抛磨工具.机器人控制器控制机器人末端位姿,间接对工具末端位姿进行控制和补偿,柔顺装置控制器直接控制工具与工件的接触力.经过建模分析,采用非线性PD (比例-微分)控制提高了柔顺装置的动...
引入生物控制理论来改善步行辅助中的人机交互柔顺性和多关节协调自律控制,探索一种髋关节CPG(中枢模式发生器)控制、膝关节分级阻抗控制和髋/膝关节联动控制3部分相结合的新型混合控制方法.首先,利用CPG自激振荡行为和对外交流的特性获得理想的主/从髋关节目标轨迹,并建立CPG对称抑制网络来维持左、右髋关节逆相位,以便实现复杂人机环境中的步行稳定性.其次,根据步态要求,设计高阻抗和低阻抗分级控制规律,分...