
搜索结果: 1-15 共查到“飞行器控制、导航技术 导航系统”相关记录63条 . 查询时间(0.045 秒)
中国科学院深圳先进技术研究院专利:基于路径交流的导航系统及方法
中国科学院深圳先进技术研究院 专利 路径交流 导航系统
2023/11/11
中国科学院深圳先进技术研究院专利:基于路径交流的导航系统及方法
中国科学院深圳先进技术研究院专利:一种定位导航系统;装置及方法
中国科学院深圳先进技术研究院专利:基于定位二维码的城市导航系统的构建方法以及导航系统
“新型惯性仪表与导航系统技术”重点学科实验室
惯性仪表 导航系统 重点学科实验室
2022/12/19
“新型惯性仪表与导航系统技术”重点学科实验室2007年7月经国防科工局批准建立,于2013年7月5日通过现场评估验收。实验室拥有精干的教研队伍和强大的软硬件资源,现有固定人员52人,其中中国工程院院士2人,中国科学院院士1人,国家杰出青年科学基金获得者4人,长江学者特聘教授6人,973计划首席科学家2人,多人多次获得国家级奖励。
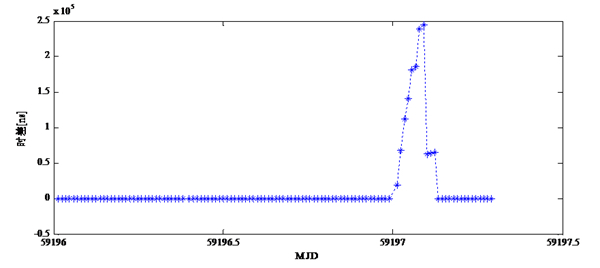
2020年12月14日,中国科学院国家授时中心系统时间性能监测评估组监测到伽利略卫星导航系统(以下简称Galileo系统)时间发生异常,异常持续时间3小时左右。该小组监测发现,Galileo系统时间从UTC时间2020年12月14日0 时起(北京时间上午8点),部分卫星播发的时间信息存在无规律的跳变,导致监测到的系统时间出现异常。以UTC(NTSC)为参考,获得的Galileo系统时间(GST)相...

“北斗卫星导航系统进展及江苏北斗应用现状浅析”讲座成功举行(图)
北斗卫星导航系统 讲座
2017/11/30
2017年11月25日上午,主题为“北斗卫星导航系统进展及江苏北斗应用现状浅析”的前沿科技类讲座在东南大学四牌楼校区东南院102成功举行,讲座嘉宾为国家测绘地理信息局青年学术和技术带头人、江苏省产业教授、江苏北斗卫星应用产业研究院副总经理/总工程师沈飞博士,讲座由东南大学党委研工部主办、东南大学研究生会承办,电子科学与工程学院研究生会、仪器科学与工程学院研究生会、江苏省电子信息领域研究生创新与学术...
第25届圣彼得堡组合导航系统国际学术会议征稿工作圆满完成
第25届 会议 导航系统
2017/10/12
近年来,在学会各级领导的指导和帮助下,学会学术交流部(国际部)与俄罗斯圣彼得堡组合导航系统国际学术会议组委会在一直保持着密切沟通和友好关系,秉承学会不断加强国际学术交流及合作的宗旨。日前,第25届圣彼得堡组合导航系统国际学术会议征文组织工作顺利完成。
自2017年9月底收到会务组邀请后,学会学术交流部(国际)随后在学会会员单位内发出征文通知,并进行了广泛宣传和动员。至10月底截稿时止,收到多家单...

2016年9月12日至16日,美国导航学会全球卫星导航系统年会(ION GNSS+ 2016)在美国俄勒冈州波特兰市会议中心举行。ION GNSS+是目前全球顶级的有关GNSS技术、产品与服务的技术交流的会议,同时还安排有大型展览和专业化的学术讲座。本届会议吸引了来自中国、美国、德国、英国、日本等四十多个国家的近千人参加,参展企业约48家。中国科学院国家授时中心副主任卢晓春研究员、克兢助理研究员作...
斜装冗余传感器的分布式导航系统研究
虚拟传感器 信息融合 分布式导航
2015/2/15
为了满足低成本、高性能惯性导航要求,解决传统单一主惯导系统的成本高、体积大等问题,利用低成本MEMS惯性传感器,采用传感器斜装冗余配置,在最优卡尔曼滤波的基础上提出了一种基于虚拟传感器的最优信息融合技术,简化了测量系统的动态模型,减小计算的同时提高了测量精度。将斜装冗余惯性测量节点安装在载体的不同位置构成基于斜装冗余传感器的分布式导航系统,分析了分布式结构,利用基于虚拟传感器的等效模型,设计了分布...
卫星导航系统的体系安全性分析方法
卫星导航系统 体系 安全性分析 功能依赖网络分析
2014/8/25
为了应对卫星导航系统内部复杂关系等体系特征为其安全分析带来的挑战、全面识别和分析卫星导航系统面临的体系安全威胁、提高系统的安全性和服务能力,基于功能依赖网络分析理论提出了从体系角度研究卫星导航系统安全性的建模方法,重点对导航系统内组件系统之间交互关系导致的危险传播、任意失效组合进行了后果分析和原因调查。仿真结果表明该方法能清晰地描述危险传播和失效组合的过程以及进行正逆向的推理分析,也证明了该方法在...
地基伪卫星导航系统的伪距精度估计方法
地基伪卫星导航系统 伪距精度 卫星导航 最小二乘
2014/7/23
地基伪卫星导航系统的伪距和伪距变率精度对评估系统的导航性能或其信息与其他系统导航信息的融合意义重大。目前的伪距和伪距变率精度估计方法基本上都是针对卫星导航系统的,并且没有充分考虑地基伪卫星导航系统自身的特点。通过构造伪距和伪距变率精度观测量,利用地基伪卫星导航系统可产生较差定位构型的特点,提出了一种在外测系统定位定速精度较差且存在杆臂长度的情况下仍然能够获取准确估计量的伪距和伪距精度估计方法。仿真...
组合导航系统滤波器截断误差抑制方法
Kalman滤波器 Bierman-Thorton算法 半物理仿真
2014/1/16
组合导航系统作为重要的定位和测姿传感器,其基本设计思想是将GPS和SINS等导航设备输出的信息经过滤波器进行最优估计。但在采用Riccati方程更新协方差矩阵和计算Kalman增益过程中,截断误差随着迭代次数的增大而累积,降低了滤波器计算的数值稳定性,严重时可能破坏协方差矩阵的正定性,导致组合系统故障发散。本文建立了Riccati方程一阶误差模型,在理论层面分析了截断误差对滤波器估计性能的影响,介...
速率方位惯性导航系统
速率方位 惯性导航系统
2013/9/12
本文提出一种把平台式和捷联式惯导系统结合在一起的新的惯性导航系统。在该系统中使用的速率方位平台没有方位稳定回路、方位坐标分解器及同步器。平台和运载器的方位角是根据由水平环架支承的方位速率陀螺讯号借助积分运算得到的。这种惯导系统适用于运输机、飞航式及弹道式导弹等不作大角度俯仰机动的运载器。文中叙述了方位速率平台的工作原理、力学编排方程、初始对准的特点以及陀螺漂移的标定和补偿;同时对各主要误差源所引起...