
搜索结果: 1-15 共查到“知识库 计算机感知”相关记录64条 . 查询时间(4.436 秒)
在城市固体废弃物焚烧(Municipal solid waste incineration,MSWI)过程中,烟气含氧量是影响焚烧效果的重要工艺参数.由于固废焚烧过程的复杂性,在实际应用过程中,难以实现烟气含氧量的有效控制.面向城市固废焚烧过程烟气含氧量控制的实际需求,提出一种基于数据驱动的烟气含氧量自适应预测控制方法.首先,采用自适应模糊C均值(Fuzzy C-means,FCM)算法辅助确定径...
一种用于目标跟踪边界框回归的光滑IoU损失
光滑IoU损失 $\ell_n$-norm损失 边界框回归 目标跟踪
2023/2/20
边界框回归分支是深度目标跟踪器的关键模块,其性能直接影响跟踪器的精度.评价精度的指标之一是交并比(Intersection over union,IoU).基于IoU的损失函数取代了$\ell_n$-norm损失成为目前主流的边界框回归损失函数,然而IoU损失函数存在2个固有缺陷:1)当预测框与真值框不相交时IoU为常量0,无法梯度下降更新边界框的参数;2)在IoU取得最优值时其梯度不存在,边界框...
视觉语言导航研究进展
视觉语言导航 视觉语言理解 跨模态匹配 具身智能
2023/1/7
视觉语言导航,即在一个未知环境中,智能体从一个起始位置出发,结合指令和周围视觉环境进行分析,并动态响应生成一系列动作,最终导航到目标位置.视觉语言导航有着广泛的应用前景,该任务近年来在多模态研究领域受到了广泛关注.不同于视觉问答和图像描述生成等传统多模态任务,视觉语言导航在多模态融合和推理方面,更具有挑战性.然而由于传统模仿学习的缺陷和数据稀缺的现象,模型面临着泛化能力不足的问题。
基于一步张量学习的多视图子空间聚类
多视图子空间聚类 张量奇异值分解 一步化学习 图学习
2023/1/7
现有多视图子空间聚类算法通常先进行张量表示学习,进而将学习到的表示张量融合为统一的亲和度矩阵.然而,因其独立地学习表示张量和亲和度矩阵,忽略了两者之间的高度相关性.为了解决此问题,提出一种基于一步张量学习的多视图子空间聚类方法,联合学习表示张量和亲和度矩阵.具体地,该方法对表示张量施加低秩张量约束,以挖掘视图的高阶相关性.利用自适应最近邻法对亲和度矩阵进行灵活重建.使用交替方向乘子法对模型进行优化...
弱对齐的跨光谱人脸检测
弱对齐 跨光谱 人脸检测 计算机视觉
2023/1/7
跨光谱人脸检测在活体人脸识别、体温筛查等领域有着重要的应用价值.众所周知,可见光人脸易于检测,然而红外人脸难于检测,因此借助可见光图像的人脸检测结果进而完成红外人脸检测是一种有效的解决方案.但是跨光谱图像之间不可避免的存在偏差,导致检测精度不高.为了解决这一问题,提出了一种弱对齐跨光谱图像的人脸检测算法,该方法基于跨光谱图像之间的偏差设计了候选框布置策略,并在此基础上提出了跨光谱特征表示方法用于选...
政府数据开放对于推动经济增长和推进社会治理现代化具有重要意义,但其作为一项复杂任务给政府信息管理实践带来了挑战,诸多风险因素限制了数据开放的广度和深度。从执行数据开放的公职人员主观视角识别感知责任风险,揭示感知责任风险的形成以及对数据开放决策的影响机制,提出风险规制策略,对于推进政府数据开放,提升政府数据管理水平,具有理论和实践意义。
中国科学院沈阳自动化研究所机器人学国家重点实验室重点研究方向
中国科学院沈阳自动化研究所机器人学国家重点实验室 研究方向 环境适应性机构设计 网络协同与自主控制 智能感知与人机共融 微纳机器人基础科学与系统 智能机器人系统技术与装备
2022/10/16
中国科学院沈阳自动化研究所机器人学国家重点实验室定位于为我国经济和社会发展、国家安全和重大科学工程提供所需要的机器人技术与系统,研究机器人学基础理论与方法、发展可行技术和平台样机系统,培养和汇聚从事机器人学研究的高水平人才,推动我国机器人技术的可持续发展,建设具有国际先进水平的国家重点实验室。根据这一定位,实验室的研究方向是:面向发展具有感知、思维和动作能力的先进机器人系统,研究机器人学基础理论与...

哈尔滨工程大学计算机科学与技术学院科研成果系列发布(第三十一期)。

哈尔滨工程大学计算机科学与技术学院科研成果系列发布(第三十七期)。

哈尔滨工业大学交通科学与工程学院科研成果自动驾驶感知、决策与控制技术(图)
哈尔滨工业大学交通科学与工程学院 科研成果 自动驾驶 感知 决策 控制
2021/10/22
哈尔滨工业大学交通科学与工程学院科研成果自动驾驶感知、决策与控制技术。
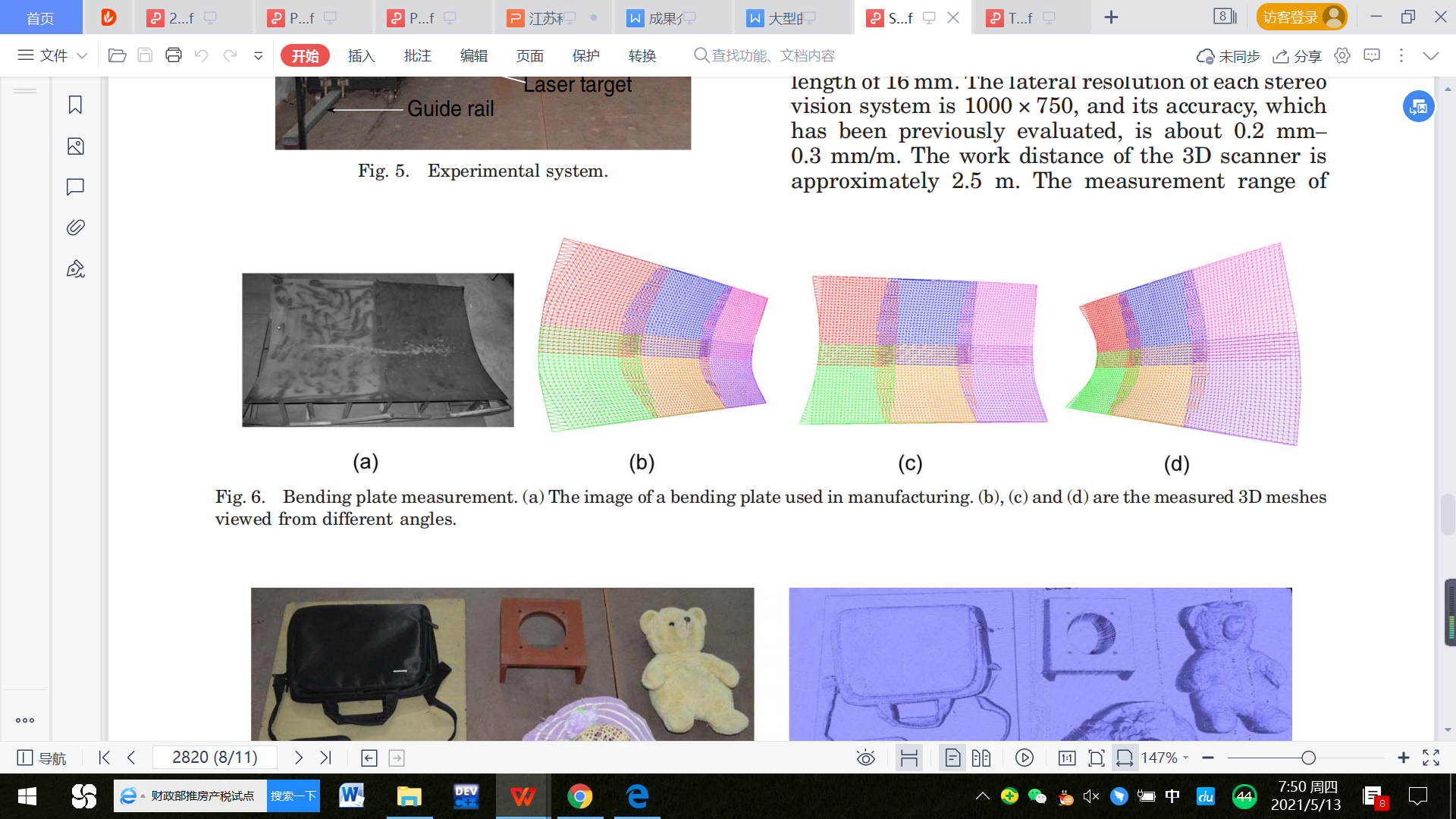
江苏科技大学计算机学院船舶感知研究所研究成果:(1)大型船舶工件快速高精度三维测量系统。主持了大型船舶工件快速高精度三维测量系统、大型工件三维检测系统的研发工作;攻克了大型物体快速稠密测量的精度问题、多次测量的高精度拼接问题、三维曲面比对分析问题、肋骨线及安装线的辅助生产问题等关键技术,为大型船舶工件的快速、高精度曲面成型加工及逆向工程提供重要保障。(2)装备综合保障系统。主持了国内外多项综合保障...

哈尔滨工程大学计算机科学与技术学院科研成果系列发布(第二十期)。
为进一步繁荣学术氛围,促进科研交流合作,推动科技成果转化,展示计算机科学与技术学院科研成果,哈尔滨工程大学计算机科学与技术学院将开展科研成果发布系列活动。哈尔滨工程大学计算机科学与技术学院请有相关科研成果的老师认真梳理可转化、待转化、有明确研发方向和可提供技术服务的项目,按照发布要求填写相关信息。科技办将不定期收取并发布科研成果进行展示。本次发布大数据与智能计算团队科研成果――基于深度学习的水下复...
智能汽车驾驶场景数据采集与分析关键技术研究及应用
智能汽车 驾驶场景 数据采集
2021/5/11
智能汽车驾驶场景数据采集与分析关键技术研究及应用。获奖年度:2020年。获奖级别:中国智能交通协会科学技术奖二等奖。该项目由中国汽车技术研究中心有限公司、中汽数据(天津)有限公司、天津大学等单位完成。项目针对智能汽车驾驶场景数据采集与分析关键技术进行了深入研究。开创了国际领先的智能汽车驾驶场景数据采集与分析理论,创新搭建了基于实车、路侧端传感器和多无人机的场景数据采集平台。