
搜索结果: 31-45 共查到“机器人控制”相关记录4679条 . 查询时间(3.089 秒)

微创、无创,是现代外科手术的总体发展趋势。微创手术机器人不仅让外科医生更好地控制手术器械、观察病灶及手术部位,还能降低医生疲劳,减少手术失误。本报告立足临床需求,首先从系统演进的角度介绍微创手术机器人的发展,总结各类使能技术的特点。其次,重点分析连续体手术机器人技术的临床应用研究,提出了连续性手术机器人系统框架图。最后,报告人介绍在连续体手术机器人领域的创新成果,并详细介绍最新发表的几篇论文的研究...
近日,我院翟永智团队参与的国家重点研发计划“城镇可持续发展关键技术研究与示范”重点专项“基于社区典型场景的智慧服务一体化技术研究与示范”和“智能机器人”重点专项“机器人工艺知识图谱生成与离线编程软件平台”项目获批立项。

2020级机电控制工程专业智能机器人竞赛成功举办(图)
机电控制 智能机器人
2024/1/4
2024年1月3日上午,“SMC”杯气动智能机器人大赛、“海天集团”杯液压气动创新设计竞赛暨2020级机电控制工程系二级项目验收,在燕山大学东校区液压实验室成功举办。燕山大学机控系主任袁晓明和部分教师代表出席本次活动,2020级机电控制工程专业全体本科生参加此次竞赛活动。

刘佳,天津职业技术师范大学自动化与电气工程学院副教授,硕士生导师,学科专业:控制理论与控制工程,研究方向:非线性系统控制、多智能体系统协同控制、移动机器人控制与应用。
杨丽,天津职业技术师范大学自动化与电气工程学院副教授,硕士生导师,专业:控制理论与控制工程,研究方向:机器人控制,毕业院校:中科院自动化研究所。

邴志刚,天津职业技术师范大学自动化与电气工程学院教授、硕士生导师。研究方向:海陆空机器人、数字孪生仿真,双碳目标(建筑电气、智能制造)相关技术、产品、软件和内容开发与应用,天津红天智能国际科技合作基地(省部级平台)中方主任、双碳技术及人才发展研究院执行院长,天津大学等多所高校兼职研究生导师。

【通知】灵峰论坛之智能机器人前沿系列活动(图)
灵峰论坛 智能机器人 人工智能
2023/12/28
机器人是人工智能、计算机科学、控制论、机构学、仿生学等多学科交叉融合而形成的高新技术,被誉为“制造业皇冠顶端的明珠”。机器人技术在制造业、医疗健康、深地深海极限环境等典型场景中具有广阔的应用前景,符合国家重大战略需求。
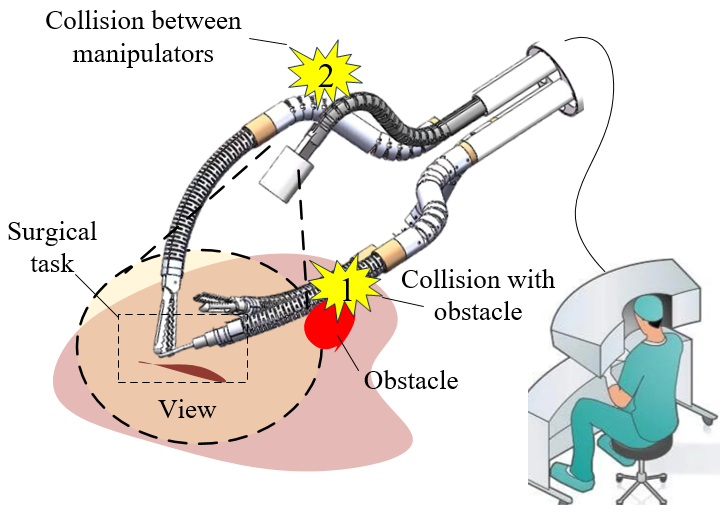
沈阳自动化所在连续体机器人主动避障控制方面研究取得新进展(图)
连续体机器人 医疗机器人
2023/12/28
2023年12月28日,中国科学院沈阳自动化研究所刘浩研究员与友谊医院张忠涛教授在连续体机器人的主动避障控制方面研究取得新进展,相关成果以Active collision avoidance for teleoperated multi-segment continuum robots toward minimally invasive surgery为题在The International Jo...
中国科学院合肥物质科学研究院专利:基于任务的机器人平台自主能力测试装置及测试方法
中国科学院合肥物质科学研究院专利:一种移动机器人地图创建系统及地图创建方法

沈阳自动化所提出子母式微纳米机器人对脑胶质瘤跨尺度递送药物新策略(图)
纳米机器人 脑胶质瘤 靶向治疗
2023/12/21
脑胶质瘤是严重危害人类健康的恶性肿瘤,患者中位生存期不到15个月,目前临床采用的治疗手段包括手术治疗、放化疗和靶向治疗等。其中,靶向治疗面临着由于血脑屏障的阻隔使得大部分药物分子不能够进入脑组织的难题。中国科学院沈阳自动化研究所科研团队与中国医科大学附属盛京医院合作,研制了一套子母式微纳米机器人系统,可经颅骨微创通道进入颅内,越过血脑屏障抵达胶质瘤部位,将药物精准递送到胶质瘤病灶。该研究以Dual...
机械臂变长度误差跟踪迭代学习控制
迭代学习控制 误差跟踪 变迭代长度 机械臂
2023/12/20
针对任意初始状态下机械臂轨迹跟踪问题,提出一种变长度误差跟踪迭代学习控制(Iterative learning control,ILC)方法.首先,构造不依赖于期望轨迹的双曲余弦型期望误差轨迹,放宽经典迭代学习控制初始状态要求严格一致的条件.由于该误差轨迹只需设置一个常数项,因而能够有效减少计算量,使得期望误差轨迹的设计更为简单.其次,考虑机械臂运行区间随迭代次数变化的问题,构建虚拟误差变量补偿机...
中国科学院合肥物质科学研究院专利:一种用于微机器人的软磁橡胶执行器制备方法
中国科学院合肥物质科学研究院 专利 微机器人 软磁橡胶 执行器
2023/12/19
中国科学院合肥物质科学研究院专利:一种用于微机器人的软磁橡胶执行器制备方法