
�������: 16-30 ���鵽�����ƿ�ѧ�뼼�� ˮ�»���������ؼ�¼111�� . ��ѯʱ��(0.162 ��)

���գ��й���ѧԺ�����Զ����о��������Ŷ������һ�ֿ��������ˮ�»������������ķ�����ͨ�����ö���ʲ�����Ϊ��ѹ������㣬���ͺ�����������ʹ����ˮ�»����������κ͵���������������¡��Ρ��ø�Զ����سɹ������� Ocean Engineering��Ŀǰ�����������ˮ�»�����ͨ������Я����Դ���磬�ܵ�������ܶȵ�����Ӱ�죬Ϊ���������������ͨ����ѡ����ĵ����豸����Ч�ƽ������͵�����������ơ�����...

2019��ȫ����ˮ�»�����Ŀ��ץȡ�������ߡ��˹�������ˮ�»������߷���̳�����У�ͼ��
2019�� ˮ�»����� Ŀ��ץȡ �˹����� ˮ�»����� �߷���̳
2019/8/22
Ϊ��һ���ٽ��˹������뺣��ǿ��ս�Լ����÷�չս�Ե�����ںϣ�2019��ˮ�»�����Ŀ��ץȡ�������˹�������ˮ�»������߷���̳�����¼�ơ�ץȡ���������߷���̳������2019��8��22��-26���ڴ������С���ץȡ���������߷���̳���ɹ�����Ȼ��ѧ����ίԱ�ᡢ����������������ͬ���죬����������ѧ�������пƼ��֡�����������ί�ᡢ����ʵ���ҡ��й���ѧԺ�����Զ����о��������������������Լ�����������ѧ�˹�����...
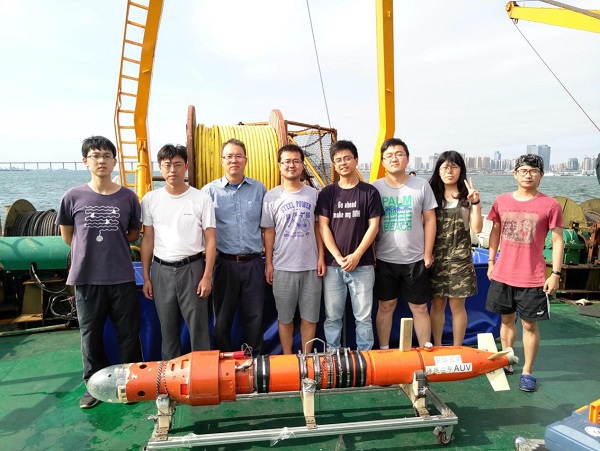
�ҹ������з�������ʽˮ�»�������̽�����ţ�2017�ꣷ�£��������Ϻ�������չ�״�������Ӧ�ã�Ԥ��ˮ����ҵʱ�䣲��Сʱ��
���������磸ʱ���ڡ���ѧ����Զ���ۺϿƿ����ĺ�װ��ϣ��ƿ���Ա�����ˡ�̽��������DZ����������������̽��������һ�������һ������ͣ�ڼװ��ϣ���Լ��.���ף�����Լ��.���ף��ĸ���ɫ����״��������װ�÷ֱ�λ�����ġ��������Ϳ���β����λ�á�
2017��5��12-16�գ��㽭��ѧ�ŵ�ѧԺ���еѧԺ������ѧԺ���ϳе��Ĺ���863�ƻ�����ƶ�ƽ̨�뺣�۲����ǽӴ��Ӳ��������������Ϻ�������ˮ���������顣��Ժ��Ԫ�������ڸ�������С�ˮ�»��������ƺ��������л���Ĺؼ��������о�������������ˮ�»�������ɫ�����Ԥ��������ˮ��50����10�γɹ����룬ˮ��105�����ڱȽ϶��Ӻ�����Ҳ�ɹ����룬������Ϊֹ���ڳɹ����еĹ��������������ɹ�����...
����ˮ������������2017�깤���뼼�����ֻ��ڹ��������̴�ѧ�ٰ�
����ˮ�л��������� 2017�� �����뼼�� ���ֻ� ���������̴�ѧ
2016/12/20
2016��12��17����18�գ�����ˮ������������2017�깤���뼼�����ֻ��ڹ��������̴�ѧ���С����λ����ɹ���ˮ���������������죬���������̴�ѧ��ͨѧԺ�а졣����ˮ������������ίԱ�����Ա�����ѧ��ɽ����ѧ�����Ŵ�ѧ�ȸ�У��43λ�����μӻ��飬��Χ�ƹ����Ƚ���ˮ���������������˲�����չ�����ۡ�����ˮ��������������ϯл������ʾ��������������չҪ��������רҵ�˲ţ��������ֻὫΪ�λ�����ˮ����������...
����ʦ����ѧ���������Ϣ����ѧԺ��2016�����ˮ��������������2016���й�������������ϲ��Ѽ�
����ʦ����ѧ���������Ϣ����ѧԺ ����ˮ�л����˴��� �й������˴���
2016/11/21
���գ�����ʦ����ѧ���������Ϣ����ѧԺ��ѧ�������Ӵ�������ʦ����ѧ��2016���й������������л���Ƚ�1������Ƚ�2���������������ȫʡ��У������ǰé����2016��������������ᡪ������ˮ�������������л�һ�Ƚ�2�������ȫʡ��У������һ��2016��10��21����25�գ��ɹ���ˮ��������������֯�Ĺ���ˮ�������������ڱ����ഴ���ʻ�չ���Ŀ�Ļ���ɺ���ʦ����ѧ���������Ϣ����ѧԺ��ʦ��������ʿ...
Ϊ��ƽṹ���߱���ת�˶����ݺͿռ���̬����˫�ع��ܵ�ˮ�»������ƽ����������ù����Լ�����������ķ��������һ��3���ɶ����沢��ʸ���ƽ������������������۹����˻��������˽ṹģ�ͣ������˻������˶����ԣ������˻�����λ��������⣮�ڱ���Լ�����̵Ļ���������ʸ���������Ƶ����˻������ſɱȾ������������ṹ���õĽ�������˻����ٶȺͼ��ٶȵĽ���ģ�ͣ�����������Ӧ����ֵ���������������˻������˶�ѧ����...
�й�ˮ�»���������̽��ȡ��ͻ��
�й� ˮ�»����� ����̽��
2016/3/28
����2016��3��25�մ��й���ѧԺ�����Զ����о�����Ϥ���й������з���ˮ�»�������DZ�����š���ǰ�ɹ��ض�����ӡ�����ϵ���Һ�����չ��������Ӧ��̽�⡣�����ֱ���Ϊ�������̴ѡ��ĸ��ӵش�����DZ�����š��������Һ���ĵ��ε�ò���ݡ����ֶദ��Һ�쳣�㣬���㵽��������Һͺ�������ȴ�����Ƭ��ȡ�ô�����Һ̽���ͻ�ơ�
ˮ��������2D����5VS5�����еĵ������
ˮ�л����� ���� 5VS5 Эͬ
2015/1/5
��Ա���ƽ̨ģ����ˮ���Ŷ���ʹ�õ�����Եı�д������ѵ����⣬Ϊ�˼���ˮ���Ե�����ԵIJ��� Ӱ�죬���ۺϵ������Ͷ���Эͬ������ԵĻ����ϣ����һ�ֶ��㽻��Эͬ���ԡ����õ����������ƣ������� �̾�����С��ǰ��������ȶ��ԣ�ͬʱ����ؽ�϶���Эͬ���Ե����ƣ�ʹ��С����Խ�Ϊ���ٵ�ǰ����ʵ���� �������ò����ܴ��ӿ�����ʵ�֣���������ʱ�䡣���㽻��Эͬ�����ܹ���Ч�ؼ������ƽ̨��ˮ���Ե���� ��...

ˮ�»������״γɹ�̽��������磨ͼ��
ˮ�»����� ��������
2014/12/18
����2014�겢û�д�����ѧ��̫��ľ�ϲ������������ɫɫ�����������ԣ���ȴ��һ�������ꡣ������֣�NASA���ġ����桱�Ż��dz��ո��ڻ����Ϸ����˼�����ټ�����ŷ�ռ�֣�ESA�����ڲ���ǰ��һ�������ͷ���һ��ϴ�»���С����½���������������ڽ���7�£��о���Աʹ��һ��������ˮ��̽����̽��������������������ĵط�֮һ�������ر����µĺ���ѧ����12��16���ھɽ�ɽ���ٿ���һ��������������ѧѧ��...
����2014��2��13�մӹ��Һ���ֻ�Ϥ���ҹ������״�������ӡ������ƽ������Ķ�������̽��ͬ���ɹ�ʵʩˮ�»������������������������¿�DZˮ����ҵ�����Һ���ֱ�ʾ��ͨ��ˮ�»������Ĺ۲⣬�й�����ƿ�������������Һ������ķֲ���Χ���˽̼�������ķֲ���������Щ��ϸ���Ͻ����ҹ��ڶ�������̽��ͬ���ĺ����ƿ���������Ҫ�ο����á�

�Ϻ����´�ѧ����ˮ�»��������Ƴɹ���ͼ��
�Ϻ����´�ѧ ���� ˮ�»�����
2013/10/25
�Ϻ����´�ѧ��ˮ�»�����������ϵͳʵ���ҡ��������ڿ����Ŷ��������Ƶ�һ������ˮ�»���������������һ�š������ϵͳ���ɣ����������˳�����һϵ��ˮ����ҵ��������������ȫ���ƹ�Ӧ�ã���Ҳ���Ժ��������ġ��Ϻ����´�ѧ�з��ĵ�һ��ˮ�»�������
�Ľ���ģ���˻��㷨��ˮ�»�����S���˶����Ʋ����Ż��е�Ӧ�ê�
���ƿ�ѧ�뼼�� ˮ�»����� �˶����� S������� ģ���˻�
2012/4/25
S�� plane control is designed based on the fuzzy logic control and the form of PID control, which is a simple and effective method, but its control parameters must be adjusted manually. The control pre...
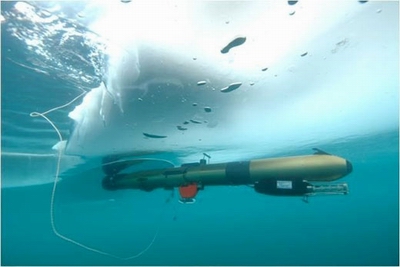
���ô�Ӣ�����ױ��Ǵ�ѧ�½����Ƴ������߿Ƽ�ˮ�»���������ֻ�ӵ���״�Ľ�ɫ��������ȡ��ΪGavia��������������̽Ѱ�ϼ�����ˮ�����������

����ʱ��2010��10��3����Ϣ���ݹ���ý�屨�������ô��ѧ�ҿ�����һ��ʹ�ý����ζ���ˮ�»�����������ͨ�����߷�ʽ���ղ�ִ��ָ�
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...