
搜索结果: 1-15 共查到“机械设计 机器人”相关记录16条 . 查询时间(0.237 秒)
中国科学院合肥物质科学研究院专利:一种仿人手家庭服务用机器手
中国科学院合肥物质科学研究院 专利 仿人手 家庭服务 机器手
2023/11/28
中国科学院合肥物质科学研究院专利:一种仿人手家庭服务用机器手

微创手术机器人(图)
微创手术机器人 医学与健康学院 哈尔滨工业大学
2022/5/30
哈工大团队研发了微创手术机器人,该机器人是面向狭窄腔道的多臂连续型微创手术机器人系统,具有小型化、易操作、形状可控、创伤小、多功能集成等优点。

本年度第三个联合研发中心--- 浙江大学机器人研究院与余姚市永创电磁阀有限公司签署战略合作框架协议暨共建“精密电磁阀联合研发中心”揭牌(图)
联合研发中心 浙江大学机器人研究院 余姚市永创电磁阀有限公司 战略合作框架协议 精密电磁阀联合研发中心 电磁阀
2022/3/25
为开启高质量快速发展新阶段,打破行业关键核心技术,2022年3月24日下午,浙江大学机器人研究院与余姚市永创电磁阀有限公司签署战略合作框架协议暨共建“精密电磁阀联合研发中心”协议。浙江大学机器人研究院常务副院长陆国栋,余姚市永创电磁阀有限公司总经理余建宏出席签约仪式并讲话。我院副院长赵川平、余姚市永创电磁阀有限公司总经理余建宏代表双方签署共建联合研发中心协议。浙江大学机器人研浙江大学机器人研究院常...

万浩川,男,河北邢台人,1981年2月出生,工学博士,副教授。2003年燕山大学机械设计及其自动化专业本科毕业,获工学学士学位;2007年天津大学工程力学专业研究生毕业,获工学硕士学位;2017年重庆大学机械传动国家重点实验室机械工程专业博士毕业,获工学博士学位。

吴海涛,男,汉族,博士,副教授。2012年毕业于东华大学机械工程专业。目前,主要从事机械设计制造及其自动化专业的教学工作,以及机电一体化系统方向的研究工作。讲授的课程主要有:《单片机原理及应用》、《电工电子技术》等;在专业期刊上发表学术论文10余篇,其中EI收录3篇;承担各级科研项目3项。
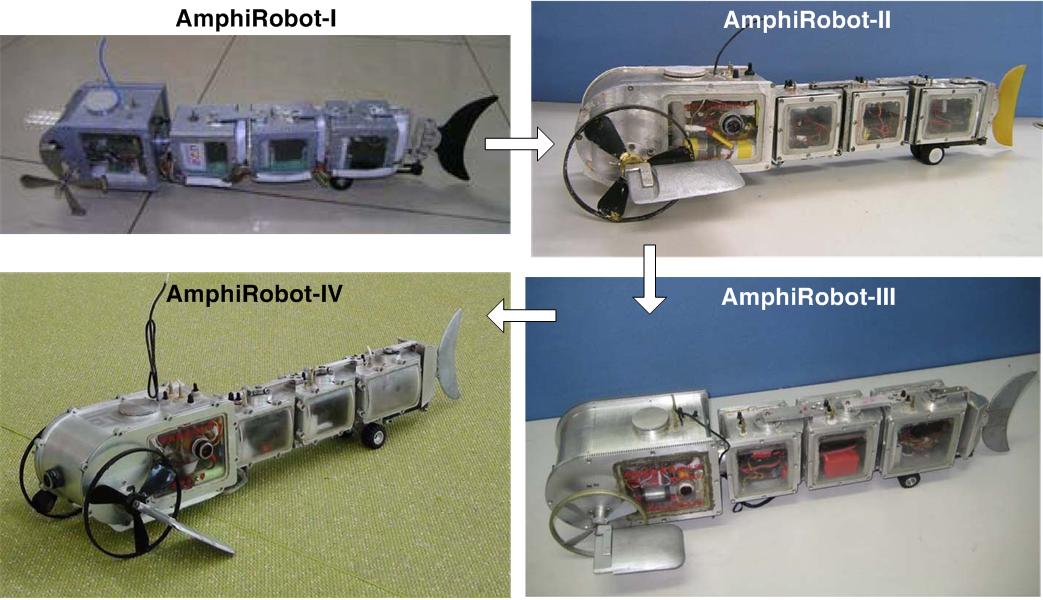
成果受到国家863项目“多模态仿生两栖机器人机构设计与运动控制 ”支持。通过机构创新和系统集成,以仿鱼推进技术为基础,辅以轮、桨、鳍一体化推进机构,研制具有快速游动性能、强大的环境感知功能及良好的水陆环境适应能力的两栖服务机器人。

2019年7月5日,机电工程学院主办的青岛大学ROBOCON机器人挑战赛与机电产品创新设计竞赛在青岛大学工程训练中心成功举行。ROBOCON智能机器人挑战赛的赛题为四足仿生机器人竞赛与电子设计竞赛两个项目;机电产品创新设计竞赛的赛题是机电产品创新设计制造,重点考察学生对机械原理、机械设计、机构设计等方面的知识。比赛自5月中旬开始,吸引了70多支队伍,300余名学生积极参加。经过初赛、预赛,最终各有...

湖南大学机器人学院易军副教授(图)
湖南大学机器人学院 易军 副教授 设计
2018/8/3
易军,博士,副教授,现任湖南大学设计艺术学院院长助理、国家级艺术与设计实验教学中心常务副主任。1970年10月生,1992年本科毕业于湖南大学工业设计系并留校任教,后获设计艺术学硕士学位和文学博士学位。2007-2008年作为国家留学基金委中意互换项目访问学者在意大利米兰理工大学(Politecnico di Milano)设计艺术学院(INDACO)反求模型与虚拟原型实验室留学研修一年,2008...
中国矿业大学董志峰教授被聘为“国际机器理论与机构学联合会”委员
中国矿业大学 董志峰 教授 国际机器理论与机构学联合会 委员
2017/4/19
据中国机械工程学会消息,中国矿业大学机电学院董志峰教授被聘为“国际机器理论与机构学联合会(IFToMM)”中国委员会委员,同时,董志峰教授还被聘为中国机械工程学会机械设计分会委员、机械传动分会副主任委员及机械无级变速器专业委员会主任委员。
模块化自主水下机器人的机械设计与实现
自主水下机器人 模块化 外形设计 结构设计
2016/6/13
介绍了一种具有基本航行能力且可扩展其他功能的模块化水下机器人.利用3维设计软件Solidworks及计算流体力学软件CFX对外形进行分析优化,降低水下机器人的功耗;对各功能舱段及段与段的连接形式采用模块化设计,结构简单,便于更换维修;此外还对耐压壳体强度及稳定性进行了理论计算及软件仿真.湖试证明,该水下机器人利用自身携带的传感器可以完成基本航行功能,包括自主定向航行、自主定速航行、自主定深航行、位...
针对室内移动机器人在智能服务任务中难以获得复杂环境语义的问题,通过设计云端语义库,实现基于语义获取框架的机器人语义地图构建,使机器人不仅掌握面向导航的环境几何描述,而且获得了复杂环境下基于丰富语义库的含物品关联归属关系的语义地图,解决了语义地图构建过程中语义信息添加可靠性低、地图更新存在误差及扩展性不足等问题.首先给出了一种语义库构建方案,基于支持向量机实现语义库分类形成子语义库,在子语义库基础上...
水中机器人带球接力策略
水中机器人 带球接力 环境信息 协作方案
2013/10/9
为提高水中机器人带球接力效率,提出一种水中机器人协作策略。分析水中机器人的运动特性,通过采 集场地环境信息,对信息进行判断,综合考虑机器人与球所处的位置来选择下一步动作。在确定机器人协作方案的 基础上,实现具体的机器人带球接力方法。仿真结果表明:该策略是有效的,能提高水中机器人的运动速率及完成 效率,在运动控制上更加灵活。
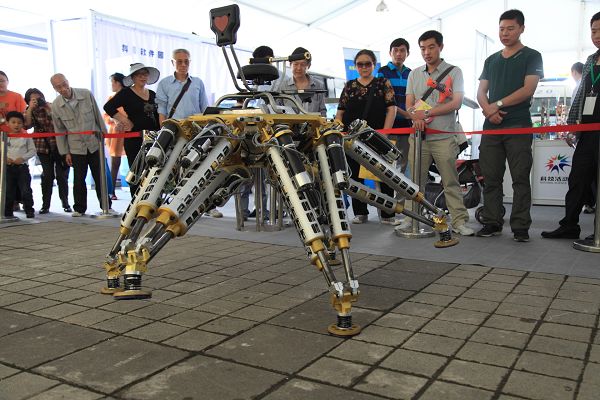
2013年5月25日,为期一周的2013年全国科技活动周暨上海科技节闭幕,参观者达5万余人次。由上海交通大学机械与动力工程学院高峰教授团队研制的系列机器人亮相上海科技节,其展出的四足、六足系列机器人通过远程人机交互操控方式,可替代人工完成复杂危险环境下搬运、搜索、探测等救援作业任务。此次展出标志着我国步行仿生机器人研究迈上一个新的高度。
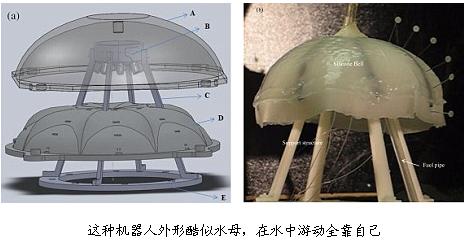
美国研制仿真水母机器人 无需外部电源 (图)
美国 研制 仿真水母机器人
2012/3/23
据英国《每日邮报》3月21日消息,美国弗吉尼亚理工学院的科研人员日前用碳纳米管和智能材料制成能在水下游动的仿真水母机器人,它的外观和游动方式与真水母极其相似。