
�������: 1-15 ���鵽�����ա������ѧ���� ����������ؼ�¼90�� . ��ѯʱ��(0.857 ��)

����ף������ѧ�����Զ�������Ϣ����ѧԺ���ݽ�ʦ���ν������Ƶ���ֻ�����������ɹ����죨ͼ��
������� �ռ�վ ���IJ�
2021/4/29
2021��4��29��11ʱ23�֣��������Bң�����ػ�����ؿռ�վ��ͺ��IJ��ں����IJ����췢�䳡�������ա��й��ռ�վ��ͺ��IJշ����������й��ռ�վ����ġ���ս����
�ھ�����Ŀ�����ɹ��У��е��48��������ѧ�����̩��˾���ƵĢ�����ֻ������������������ͺ��IJ��غ�Ӧ��ϵͳѭ��������ϵͳ�ÿ��Ͽ��ƣ��Ѿ�����ͺ��IJ��غ�Ӧ��ϵͳѭ��������ϵͳ�ɹ����죬��վ��ݣ�
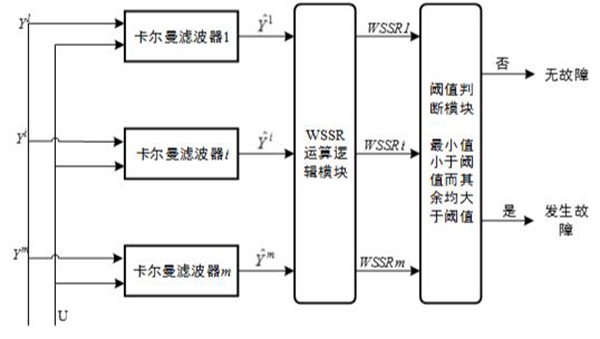
���շ������п���ϵͳͨ���������������ź���ʵ�ֶ�����״̬�ļ������ƣ���������������źŵ�ȷ�ɿ��ǿ���ϵͳ��ȫ�ȶ����еĹؼ����أ�Ϊ����߿���ϵͳ���ȶ��ԡ���ȫ�Լ��ɿ��ԣ������������й�����ϡ����뼰�ź��ع�������Ҫ���壬�ڹ�������бȽϳ���ķ�������ֵ�����������й�����ֵ��ѡȡ����һ���ѵ㣬�����Ҫ���Dz����Ż��㷨�Դ�ͳ��ֵ�����������о���Ա�����˻��ڿ������˲��Ĺ�����Ϸ����Է���������������...

�����ѧ���պ���ѧԺ�ڸ�����������ѹ������������ȡ���½�չ��ͼ��
�����ѧ���պ���ѧԺ �������� ���� ѹ�������� ��ά2Dʯīϩ
2019/9/20
�������ȿɴ����Ϳ��۵���ѹ���������Ŀ������˻��������˶�����������������ĺ��Ŀ���֮һ���������������о�����֤ʵ���ײ��Ͽ��Գ���������������ܣ�������ѹ�����������ϵ���Ҫ�о�����ά��2D��ʯīϩ���������ĵ����ԡ���еǿ�Ⱥ������Ե����ƣ���˱���Ϊ�Ǽ���Ӧ��ǰ��������������ϵ��Ҳ�Ѿ����㷺�����ڹ���ѹ��ʽ��������Ȼ����2Dʯīϩ�������ѹ�����Էdz����ޣ���Ӧ��ͨ��ҪС��6.0%����Ȼ��������ʵ...
��Ե�ƽ̨�����ٿո߳����ٷ���������ȫ������̽�⡢�ȶ����ٵ����⣬�����˻��ڶ�ƽ̨��������Эͬ̽�������ϵ��ͨ�����ٿո߳����ٷ�������ս���ԡ�̽���������ϸ�������������������ٿջ����ջ��͵�/����ƽ̨��ɵ����ٿյ�/����ƽ̨Эͬ̽����ϵ���ص��������ϵ�ṹ��̽��ʱ���̣�������ٿյ�/��Эͬ̽�����ƽ̨��ͨ��STK��ƽ̨��̬����Ͷ�Ŀ�����Ч�������˷����������������֤�����ٿյ�/����ƽ...
Ϊ�˽��ͺ����ɱ�������װ��Ч�ѱȣ��Եͳɱ������Ƶ�ը������ϵ���ϵͳΪ�о���������㷨�о���������չ�������˲��㷨������MEMS���ݺͼ��ټ�Ϊ���ģ�GPS�����ĵͳɱ����߾�����ϵ���ϵͳ���������˻���������Ը�ϵͳ�ĵ������ܽ����������ó�������ݣ����봿���Ե��������Աȡ�ʵ�����������õ���ϵͳ��λ�����ܴﵽ2m���ڣ�ϵͳ���㾫�����㺽���Ƶ�ը������Ҫ�Գ��溽���Ƶ���������й���ʵ�����塣
���ĸ�����һ���µĶ����ࣨ���������������ռ����Ĺ���ģ�ͣ�����ͬʱ�����ڹ̶�ƽ̨���κ��˶�ƽ̨�����µĶ��������ռ�������ģ�Ͳ����ɹ��Ƴ��õ���������ࡢ����ϵͳ���;������桢ƽ̨��̬��ƫ�����չ�������������ڷ�����ͳһ�˳��õģ����壩��С���˷���������Ȼ���㷨�Լ���չ���������µ����㷨�����⣬���ڸ�ģ�Ϳɷ���ض�ƫ������Ŀɹ۲��Խ��з������졣���������������ڸ�ģ�͵ĸ����㷨��...
��Դ���������ת��λ��������г����������Ķ�Ƶ�Ŷ����⣬�����һ�ֻ��ڼ��������ݲ�����ȫת������Ӧ���Ʒ��������ȸ��ݶ�Ƶ�Ŷ����ԣ�����ּ�������Ӧ�����ݲ�����ÿ���ݲ�����Ӧһ���ݲ�Ƶ�ʣ�Ȼ���ݲ����������ֱ�������Dz����������ջ����ƻ�·��ȫת�ٷ�Χ�ڵ��ȶ������⡣����������ɶȴ���������Ϊʵ��������ʵ����֤��ʵ����������������㷨�ܹ���ȫת�ٷ�Χ����Ч������г���Ŷ���
бװ�����������ķֲ�ʽ����ϵͳ�о�
������� ��Ϣ�ں� �ֲ�ʽ����
2015/2/15
Ϊ������ͳɱ��������ܹ��Ե���Ҫ�����ͳ��һ���ߵ�ϵͳ�ijɱ��ߡ����������⣬���õͳɱ�MEMS����������������������бװ�������ã������ſ������˲��Ļ����������һ�ֻ���������������������Ϣ�ںϼ��������˲���ϵͳ�Ķ�̬ģ�ͣ���С�����ͬʱ����˲������ȡ���бװ������Բ����ڵ㰲װ������IJ�ͬλ�ù��ɻ���бװ�����������ķֲ�ʽ����ϵͳ�������˷ֲ�ʽ�ṹ�����û��������������ĵ�Чģ�ͣ�����˷ֲ�...

2014��12��3����9�գ��й���ѧԺң�������ֵ����о������Ϳ����˻������ң�г�ͼ�������������������㽭ʡ�����سɹ���ɡ��˴���������ң�п�ѧ�����ص�ʵ���ҹ������о�Ա���ֵ������豸��������Ŀ�����Ϳ����˻������ң�г�ͼ�������������غ�ϵͳ�������ơ�ȡ�õ���Ҫ��չ��
��Գ����������ܵ��������߲������⣬�����һ�����ö������������ںϵĹܵ��������㷽������ʹ�ùܵ��ڼ�����Գ����������ܵ������ڼ��ʱ�����ڼ������װ�ع��Բ�����Ԫ��IMU������̼ƣ�ͨ�����ص�Ƶ�������������GPS��Ǻл���ڼ���λ����Ϣ��ʹ�õ���ϵͳ�ͷ����Զ�̬ϵͳ������ģ������IMU���ݼ���̼����ݽ��к�λ���㣬��������չ�Ϳ������˲����Թߵ�ϵͳ����̼Ƶĸ��������й��ƺͲ�������ϵ�...
��������õ�Ŀ�Ӿ��뼤�����ǻ�ϵĺ����������λ�ú���̬���������Ľ����㷨������������Ԫ�������㷨,����5���ǹ����������͵�Ŀ�Ӿ���ȡ�����������λ�ú���̬�����Ľ�����,���Խ������������;Ȼ��,������6Dλ�˲����뼤�����ǻ�ȡ��1D��������ں�,�Խ�һ����6Dλ�˲����������������,ͨ������ʵ���Ը��㷨������ѧ����,����������:���㷨��֤��������궨�����������ȡ��ƥ��ϴ�����µ�λ�˲�...
����ũ����Ϣ�ɼ�����������������̬��������У�������̬�Dz�������ȷ��һ���⡣ѡ����ڼ��ٶȼơ����������������ǵĽ���ʽ���Բ���ϵͳ�����ÿ������˲��㷨��ͨ���ں϶���������IJ������ݣ�������߾��ȵ���̬�ǡ�Ϊ��֤�������˲��㷨����Ч�Ժ�ʵ���ԣ������������������̬���ʵ��ƽ̨��������������������˲��㷨����֮�����̬�Ƕ�̬��Ӧ�ã����㾫�ȸߣ����������������ڡ�1.5�����ڣ��������ɼ��ٶȼƻ�...
����˻���ִ�л���ģ�ͺͺ��շ�������ģ�͵�ִ�л���������������һ������ϺͶ�λ����.����ִ�л���С�ջ��ṹ������3��ִ�л������ݺ���ģ��.��������������BP(back propagation)������,�����˺��շ�������̬��ģ��Ͷ�̬����ģ��,�γɺ��շ�������ģ��,��ʵ�ֻ��ں��շ����������ȼ����������.��ִ�л���ģ����������������֮���ƫ��Ϊ���ݽ��й����б�,�Ժ��շ�������ģ����������������...
Ϊ��ʹԼ����С����֧��������(RLSSVM)���и��õ�ϡ���Ժͷ�������,�����ֽ���(DE)�㷨ѡ��RLSSVM��֧������,�����DE-RLSSVM�㷨.��benchmark�ع����ݼ��ϵķ�������������㷨���кܺõ�ϡ���Ժͷ�������.Ȼ���㷨���ں��շ��������������ϵ����,����˻���DE-RLSSVM�㷨�ĺ��շ�����������������Ϸ���.�÷�������DE-RLSSVM�㷨�����������Ͻ��м��,Ȼ��...
������Ӧ����/�¶���������������Է���
���������鼼�� ���������� �������� �����¶Ȳ��� ����Ԫ���� ��Ӧ���Ԫ�
2013/8/4
��Ը߳����ٷ�������ʱ�����������ͬʱ���������¶Ⱥ�������Ҫ�������һ�ֿ�����Ӧ����������ʽ�������������ڲ�ͬ������������γ��ȵ�ż�ӵ㣬ͨ�������������¶���Ӧ����������������������¶ȡ�����������������Ԫ��ֵģ�ͣ�ͨ���������ڲ����ȼ��㣬����������Ӧ���ԡ���ֵ��������������ʱ����Ӧ�����������ڲ��¶���Ӧ�ͷֲ��������ۼٶ��������ݴ���ʱ�����²���ʹ������ͬʱ�õ������������������¶ȣ�����...
�й��о����������а�-��
- ���ڼ���...
�й�ѧ���ڿ����а�-��
- ���ڼ���...
�����ѧ���л������а�-��
- ���ڼ���...
�й���ѧ���а�-��
- ���ڼ���...
�ˡ���-ƪ
- ���ڼ���...
�Ρ���-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
�������� -ƪ
- ���ڼ���...
֪ʶҪ��-ƪ
- ���ڼ���...
���ʶ�̬-ƪ
- ���ڼ���...
��������-ƪ
- ���ڼ���...
ѧ��ָ��-ƪ
- ���ڼ���...
ѧ��վ��-ƪ
- ���ڼ���...