
搜索结果: 1-15 共查到“机器人控制 材料”相关记录19条 . 查询时间(1.274 秒)
Academy of Mathematics and Systems Science, CAS Colloquia & Seminars:基于阻塞效应的可变刚度结构和材料在软体机器人领域中的应用
阻塞效应 可变刚度结构 材料 软体机器人
2023/11/24
软体机器人是智能机器人领域中的新兴方向,以其可大范围变形、可变材料性质的物理特征和复杂环境适应性强、人机交互安全性高的应用优势而受到广泛关注。基于阻塞效应(jamming transition)的可变刚度性质是软体机器人独有的全新属性,从材料上赋予了机器人“刚柔并济”的能力,不仅能增强机器人适应不同工件或者周围环境的能力,还可应用于人机交互的机器人以提高安全性。和其他软体机器人可变刚度基于阻塞效应...

舒鑫东,硕士,高级工程师,主要从事永磁直驱电机驱动设计、机器人驱动控制系统设计与控制理论研究。作为核心骨干参与国家自然科学基金,国家科技支撑计划,中科院重点部署项目,浙江省重点研发计划项目,及宁波市重大专项等近10余个项目。获国家授权发明专利5项,授权实用新型3项,其中获中国专利优秀奖1项。在国内外学术期刊和国际学术会议上发表论文10余篇。

方灶军,博士,研究员,博士生导师,宁波市领军与拔尖人才(第二层次),从事视觉测量与机器人控制、绳驱动机器人、移动机器人定位导航方面研究。主持国家自然科学基金重点项目、国家重点研发计划“智能机器人”专项、国家科技支撑计划、浙江省重点研发计划等项目,作为骨干参与国家“863”计划、工信部数控科技重大专项、国家自然科学基金等项目,发表学术论文100余篇,其中SCI检索论文30余篇,授权/申请国家发明专利...
宁波材料所在磨抛机器人方面取得进展(图)
磨抛机器人 系统结构 氮气弹簧
2023/2/1
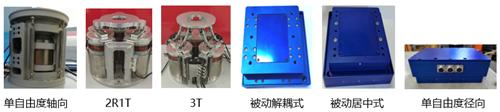
磨抛是典型的连续接触式操作,力控技术直接影响磨抛效率和质量,因而至关重要。传统上,一般采用基于机器人关节力矩的直接力控方法,存在力控精度低、动态响应慢等缺点。而机器人加力控末端执行器的间接力控方法采用了宏微系统结构,在小范围内动作时只需调整力控末端执行器的位姿即可,避免了宏机器人大惯性动作对力控精度和动态响应的影响,可有效解决直接力控方法存在的问题。目前,虽然有研发机构或公司研制了力控末端执行器,...
中国科学院宁波材料技术与工程研究所先进制造技术研究所成果:全向移动机器人(图)
先进制造技术研究所 成果 移动机器人
2022/12/25
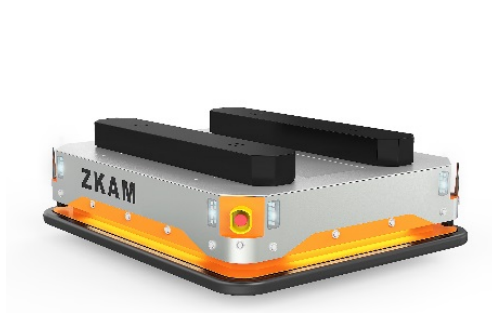
本项目创新设计了一种基于解耦式主动万向脚轮的全向移动机器人,可实现0-360°的无滑转滑移的运动,与传统移动式机器人相比,其具有无转弯半径且灵活高效的优势。围绕全向移动式机器人,精密驱动与智能机器人技术团队掌握了相关的高效直驱电机设计技术、高性能直驱电机驱动控制及底层运动控制技术和机器人定位导航等核心关键技术,拥有核心技术知识产权,可根据需求进行定制化。在机器人与智能制造装备技术的市场需求日益增长...

智能化、类人化、柔性化是未来机器人发展的重要趋势。人形机器人,尤其是具备人工智能算法功能的人形机器人,不仅可以在日常生活中用于个人协助和护理,而且可以在危险任务中用于搜索和救援等。机器人的感知系统能够从外界收集数据,并根据外界环境的变化做出不同的响应,这对于提高机器人的服务质量和寿命是至关重要的。其中,痛觉感受器是一类重要的传感器,它可以识别来自于外界温度、压力等极端条件的潜在危险,并产生预警信号...
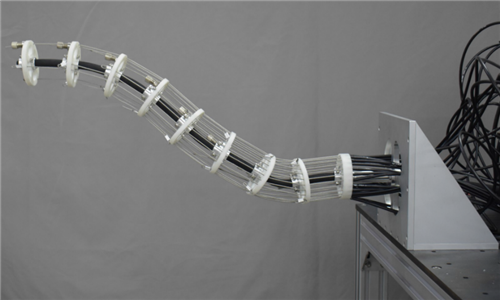
中国科学院宁波材料技术与工程研究所精密驱动与机器人团队利用了绳索的高效力传导以及具有本质柔性的特点,研发了具有多个关节模块的绳索驱动连续体机器人臂,绳驱动机器人臂采用多根轻质绳索协同驱动,与传统主动关节驱动的机器人臂不同,绳驱动机器人臂是由被动关节支撑,主动绳索驱动,由于主动绳索的驱动装置全都安装在机座上,因此绳驱动机器人臂具有自重轻、转动惯量小和易于实现变刚度控制等优点,既能够产生本质安全的运动...

触觉电子皮肤因其在医疗、假肢和机器人等领域的重要应用而受到广泛关注和深入研究。致力于重塑皮肤的触觉感觉功能,触觉电子皮肤需要的不仅仅是感知能力,更重要的是能够同时检测并且区分多种刺激的能力。在触觉感受中,温度和压力是最常见的两种刺激,然而单个器件同时检测并且区分多个刺激却面临着巨大的挑战。因此,在可穿戴传感中,能够同时检测并且区分温度和压力的触觉皮肤具有重要的实际应用意义,而要实现对于温度和压力两...

多孔介质材料让自主水下机器人“游”得更远(图)
多孔介质材料 自主水下机器人 续航能力
2020/3/18
近日,中国科学院沈阳自动化研究所科研团队提出了一种可提高自主水下机器人续航力的方法,通过采用多孔介质材料作为耐压壳体表层,降低航行阻力,可使自主水下机器人在外形和电池容量不变的情况下“游”得更远,相关成果发表于 Ocean Engineering。目前,大多数自主水下机器人通过自身携带能源供电,受电池能量密度等因素影响,为提高其续航能力,通常会选择低功耗电子设备、高效推进方法和低阻力外形设计。沈阳...

2019年6月27日下午,新加坡南洋理工大学教授陈义明应中国科学院宁波材料技术与工程研究所副所长、所属先进制造所所长杨桂林研究员的邀请到宁波材料所进行学术交流,并做了题为“智能机器人与隐形冠军:探讨机器人系统、视觉与学习”的报告。陈义明的报告从物流机器人、建筑机器人以及社交教育机器人在行业中的实际应用为例,介绍了机器人从研究到产业化应用中所面临的机遇及挑战。陈义明认为,机器人应用于建筑制造及服务行...

黄银,博士,副教授,2009年于湖南大学工程力学专业获得工学学学士学位, 2014年于清华大学获得力学博士学位。同年,留在清华大学黄永刚教授和冯雪教授课题组从事博士后研究,2017年11月以人才引进方式到西南交通大学材料科学与工程学院工作。目前,以第一或通讯作者身份在ACS Applied Materials & Interfaces、Soft Matter等国际知名期刊上发表学术论文11篇,其中...
近日,东南大学物理学院王金兰教授课题组通过结合机器学习(ML)技术和密度泛函理论(DFT),提出了一套智能化的材料设计新策略,成功预测了5000余种潜在有机无机杂化钙钛矿材料(HOIPs)的带隙,并且从中挑选出了多种环境稳定、带隙适中的无铅HOIPs太阳能电池材料。该研究成果在线发表在Nature子刊《自然•通讯》(Nature Communications)上,标题为Accelera...

中国科学院深圳先进技术研究院柔软材料表面爬行机器人研究获新成果(图)
可穿戴机器人 运动控制 爬行机器人
2018/3/28
可穿戴机器人是机器人研究领域的重要分支之一,对于促进新型医疗与现代军事作战有重要的意义。在该领域内准确性与鲁棒性是现存的两大技术难点,难点之一在于与柔性材料接触,精确的系统建模难以实现,难点之二在于难以建立鲁棒的系统控制方法及所携带硬件控制器的计算能力受限。

中国科学院宁波材料技术与工程研究所先进制造技术研究所精密运动与先进机器人团队最新研发的高速高精并联机器人,可以完成3T1R(三个平动一个转动)四个自由度的运动,实现了少自由度并联机器人的构型创新。在机构构型设计上,采用了独特的M型4-2-1并联机构构型设计,结构紧凑好、重心低,有效提高了系统的刚度和稳定性。研究团队通过机构运动学特性分析,发现该机构具有简单的正向和逆向运动学求解算法。在驱动设计上,...
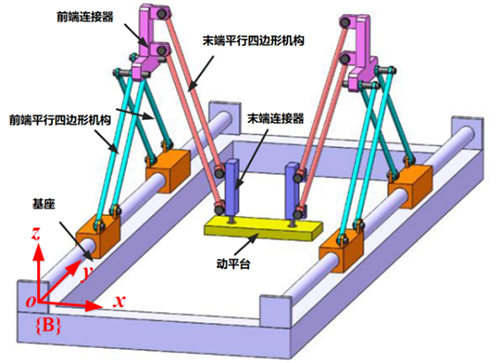
中国科学院宁波材料技术与工程研究所先进制造技术研究所精密运动与先进机器人团队最新设计的四自由度并联机器人,可以实现3T1R四个自由度的运动,是少自由度并联机器人的创新设计之一,其主要特点为2条相同支链通过被动转动副连接到动平台上,且每条支链有2个相同分支通过安装在基座上的移动副作为驱动。为进一步分析机构特点,采用螺旋理论验证了该机构自由度的数目及机构的运动学特性,得到了其位置的封闭解,根据机构的运...